【RobotStudio学习笔记】(一)软件的安装与初步测试
RobotStudio 6.03.02 的安装
链接:https://pan.baidu.com/s/1NyDTu_OCcPJLbfaQLtCHCw
提取码:robo
1. 安装注意事项
(1)PC用户名为英文
(2)安装路径为英文
(3)安装过程全程联网
2. 安装方法
(1)将安装包解压,运行安装包内的setup.exe程序,按照提示安装即可,比较简单。
(2)安装完成后双击RobotStudio_5.61.02注册补丁.reg。
(3)打开RobotStudio即可完成安装。
初次测试
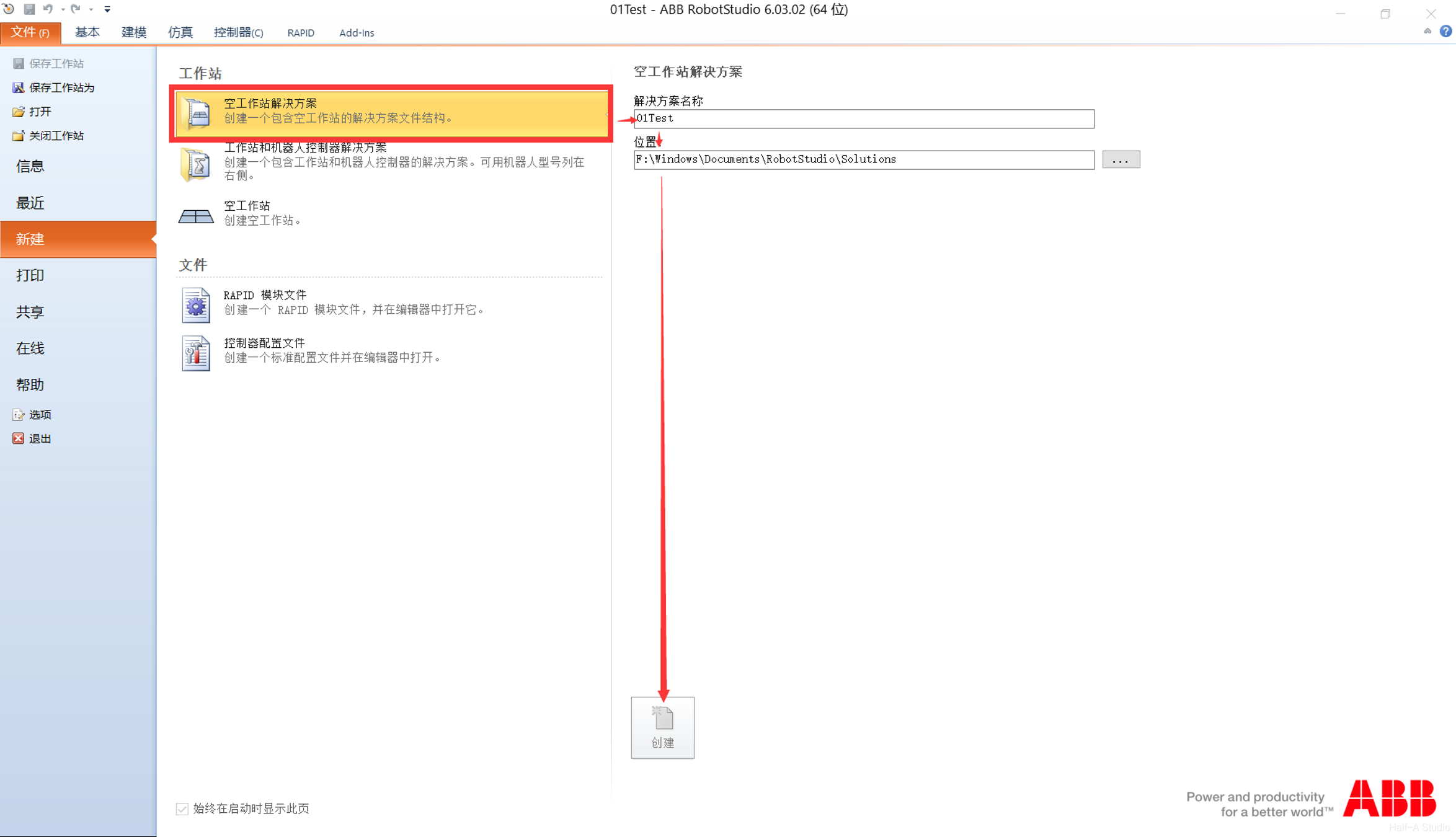
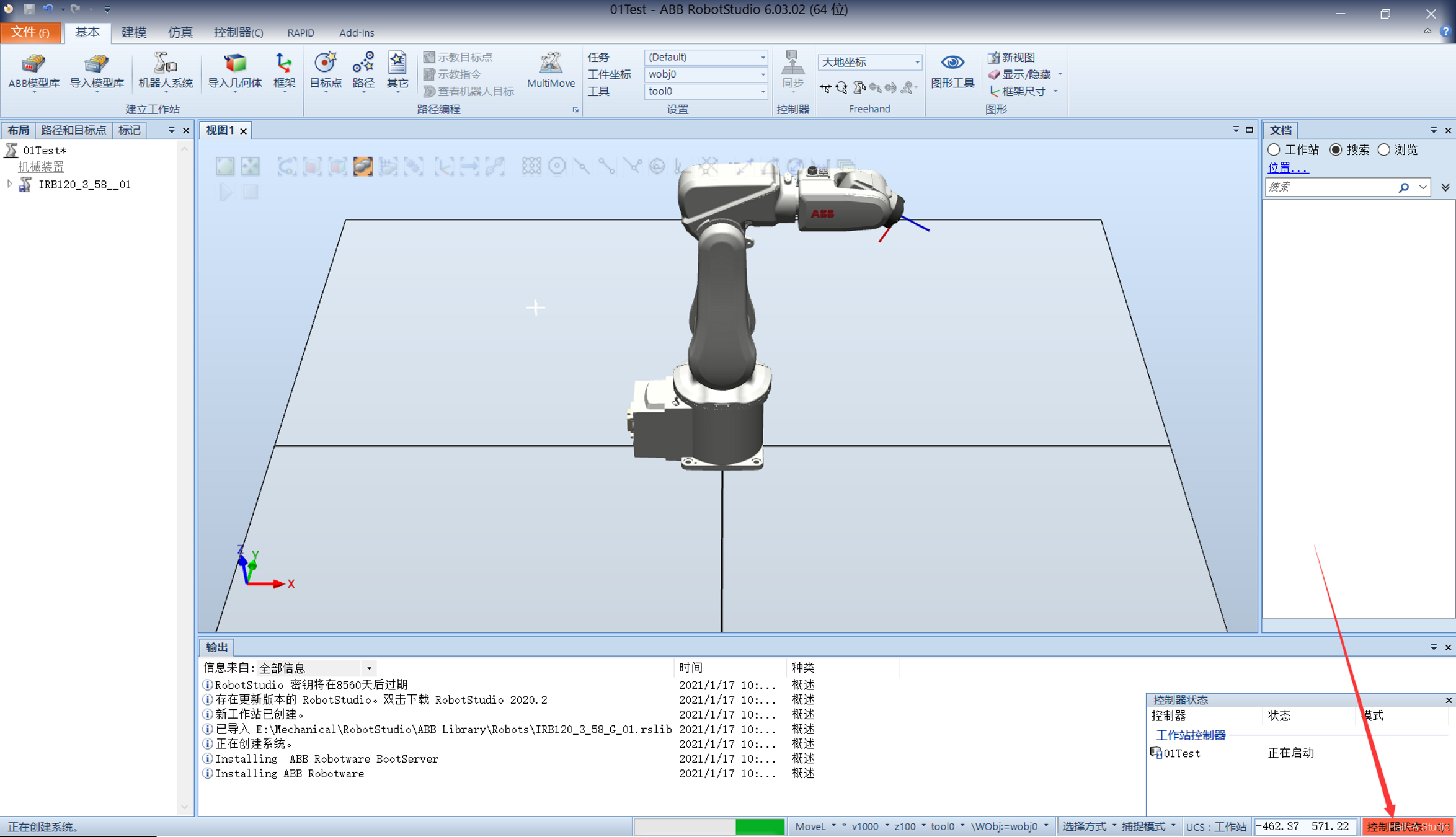
- 打开RobotStudio软件,新建一个空工作站解决方案。
- 点击左上角ABB模型库,导入一个IRB 120确定


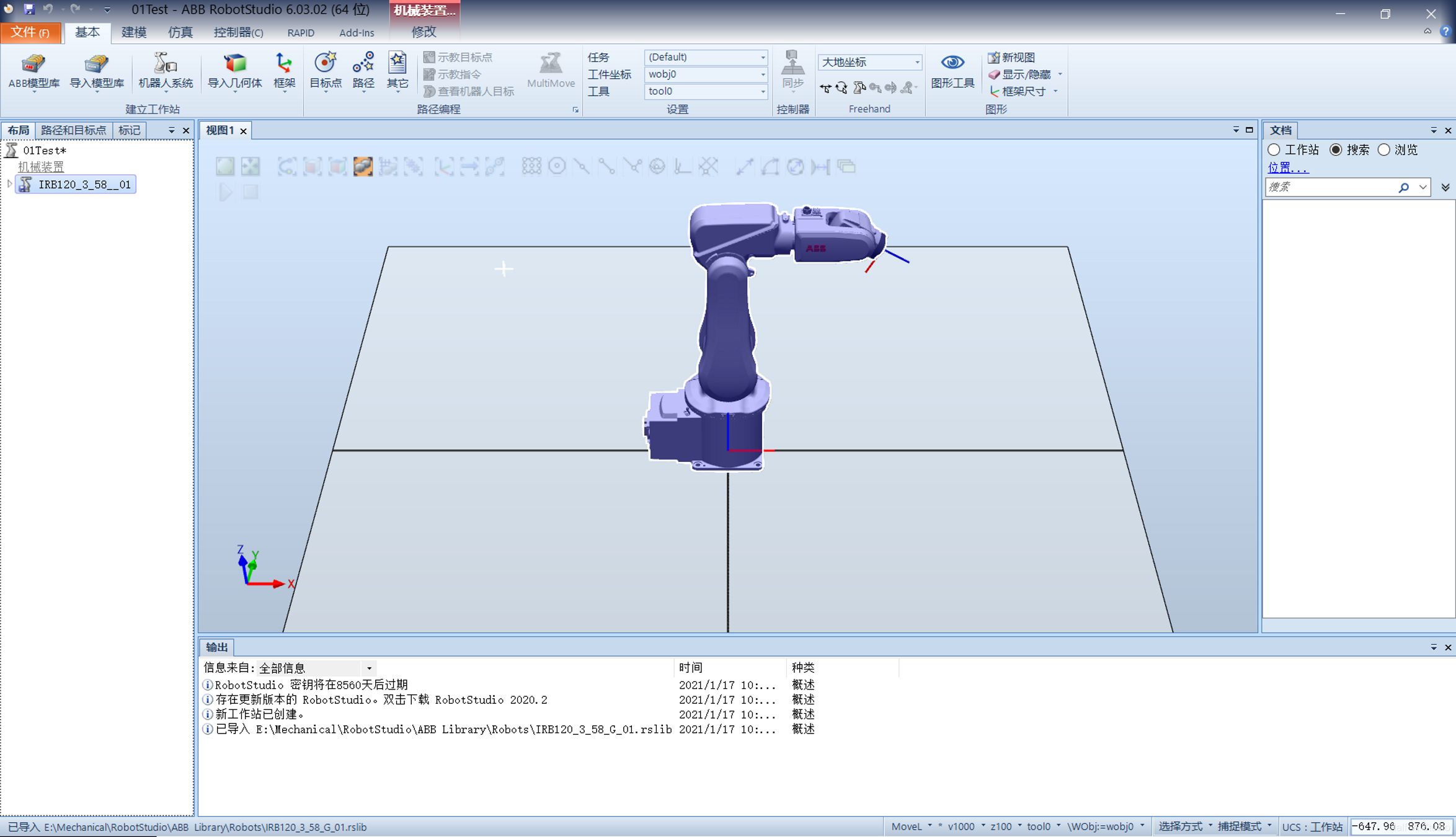
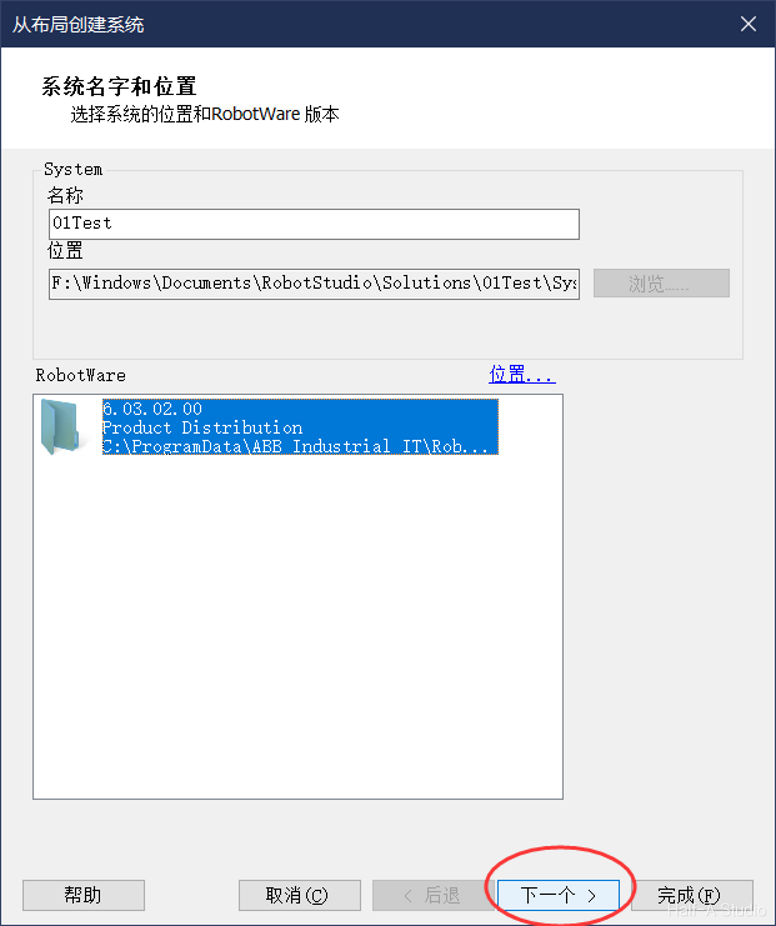
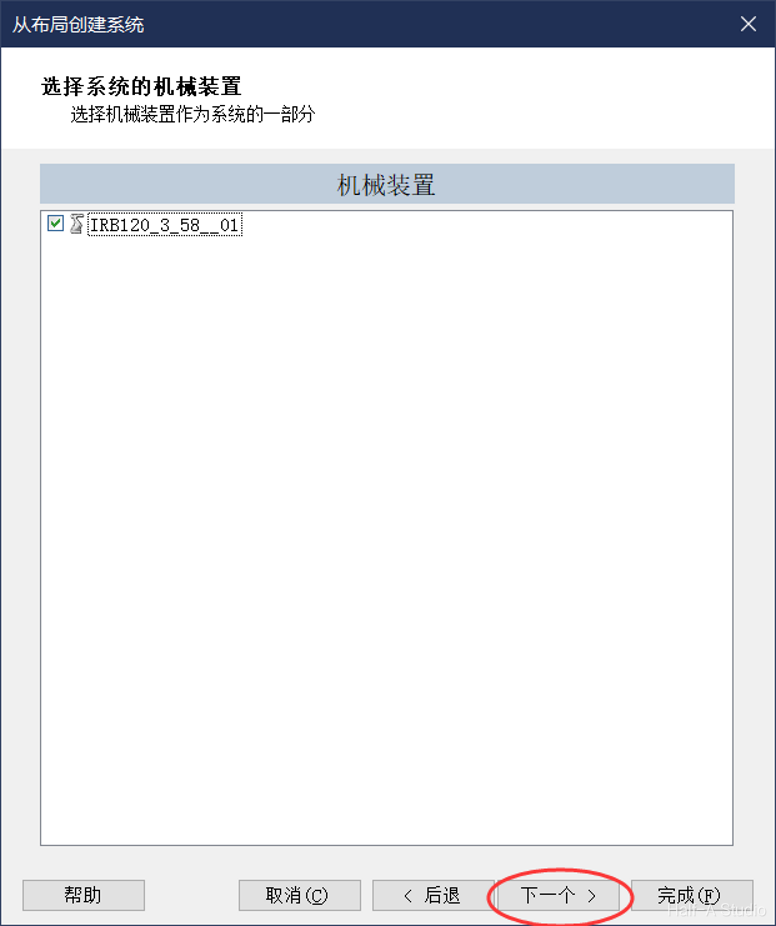
- 然后点击机器人系统-从布局创建系统,选择一个6.03的软件版本
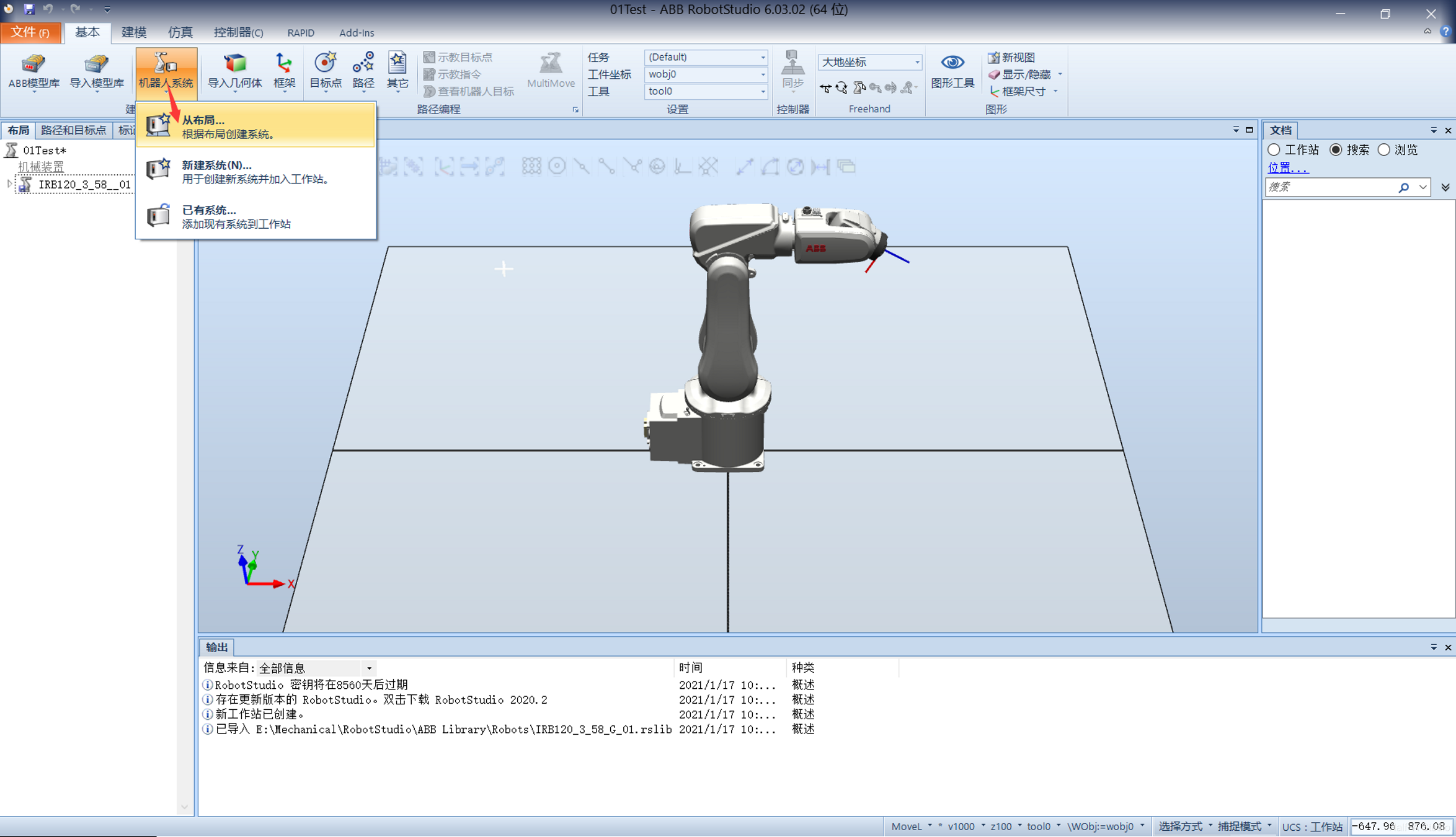
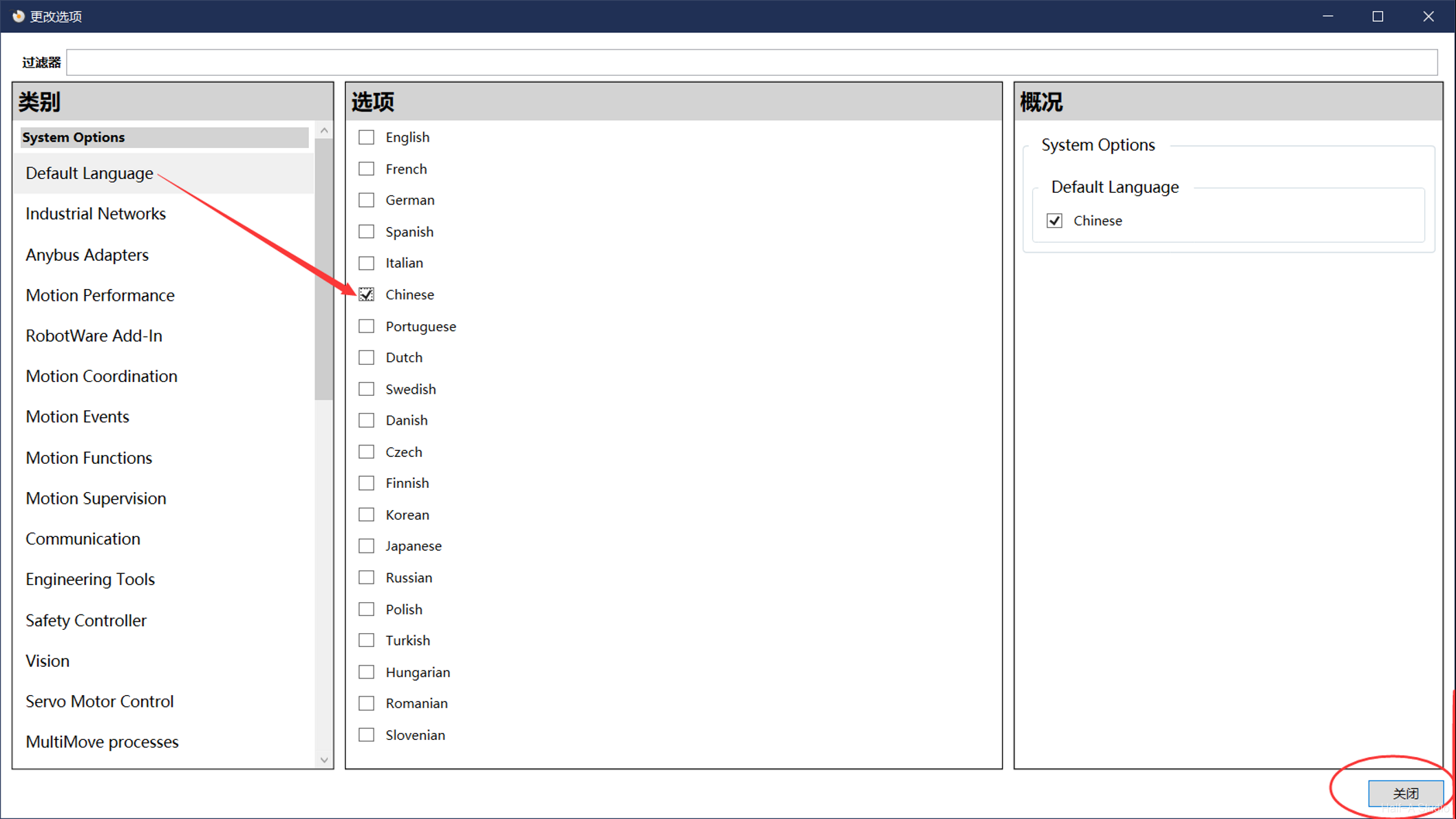
点击选项,将其中的默认语言改为中文,点击完成即可,稍等一段时间等待系统创建完成。

- 当下方控制器状态变成绿色的时候说明系统已经创建完成了。

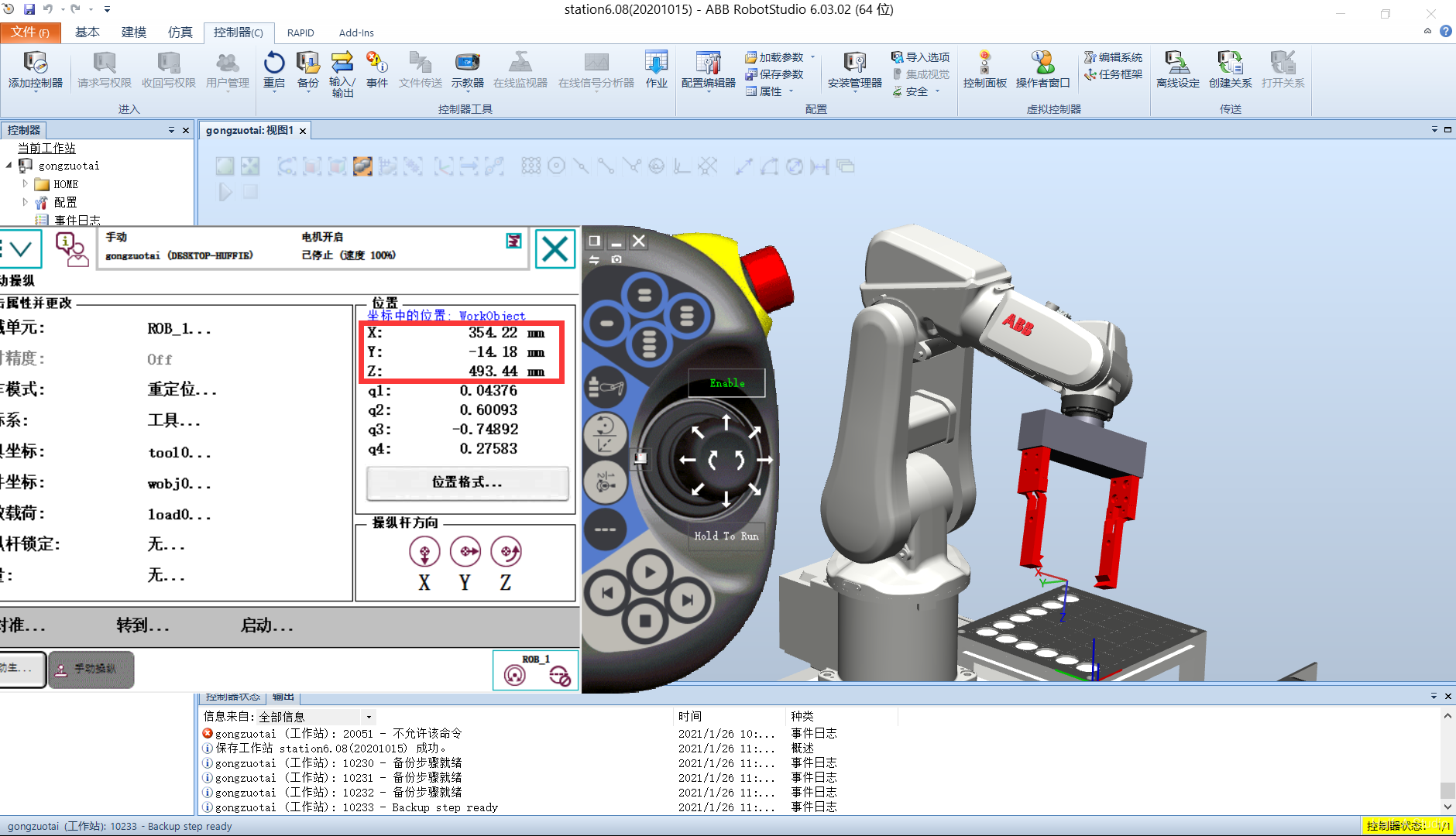
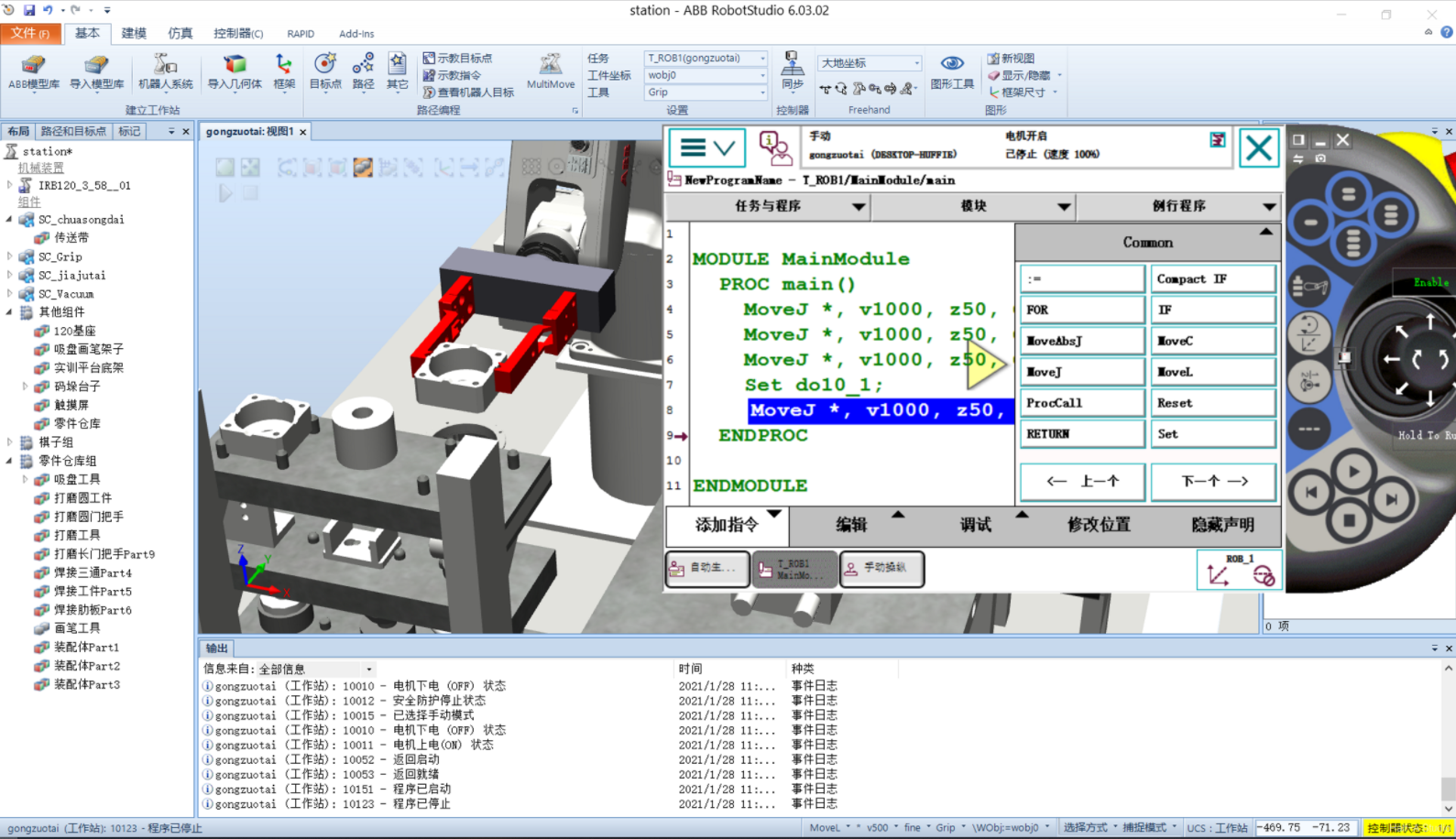
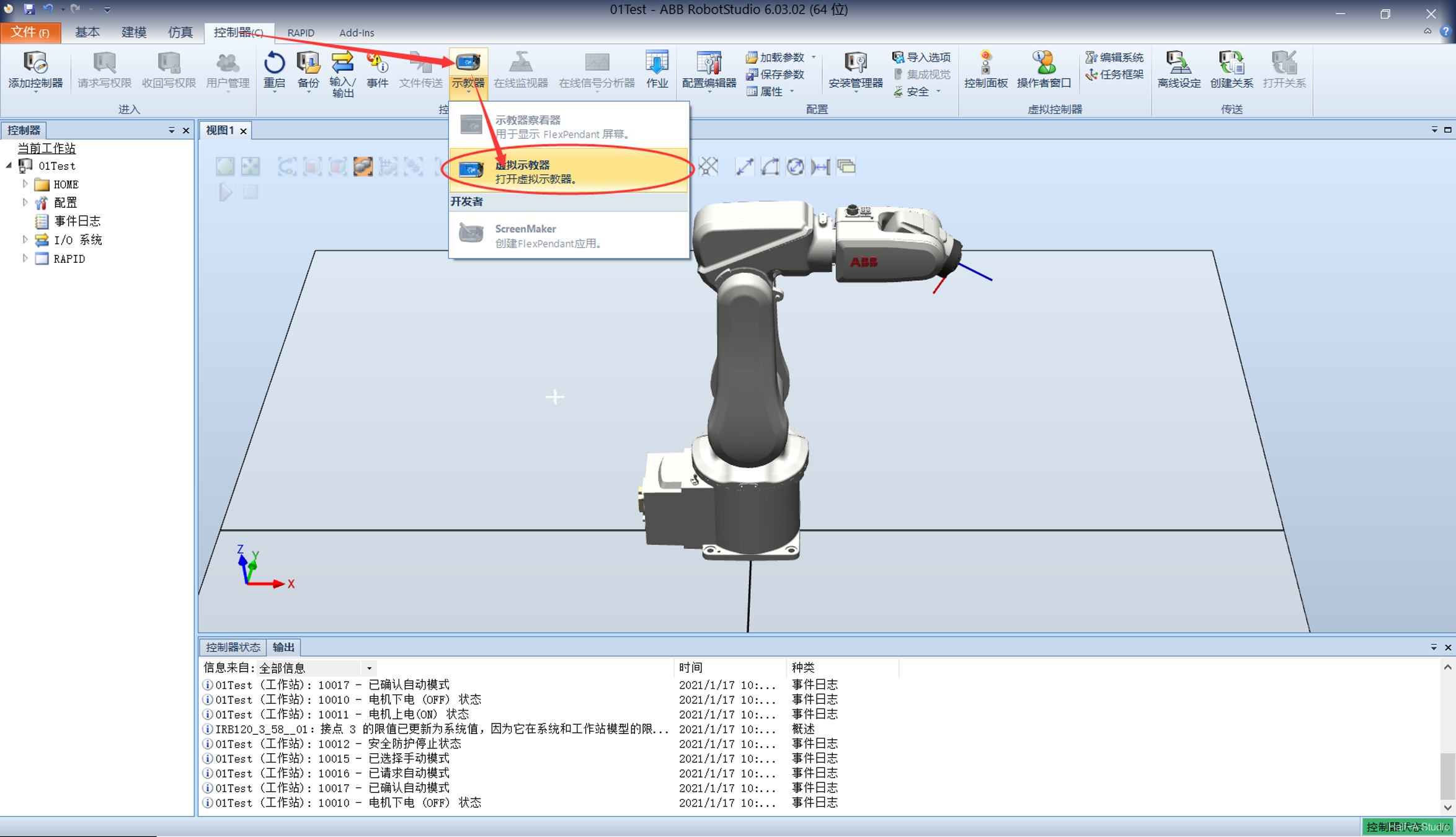
- 点击上方 控制器-示教器-虚拟示教器
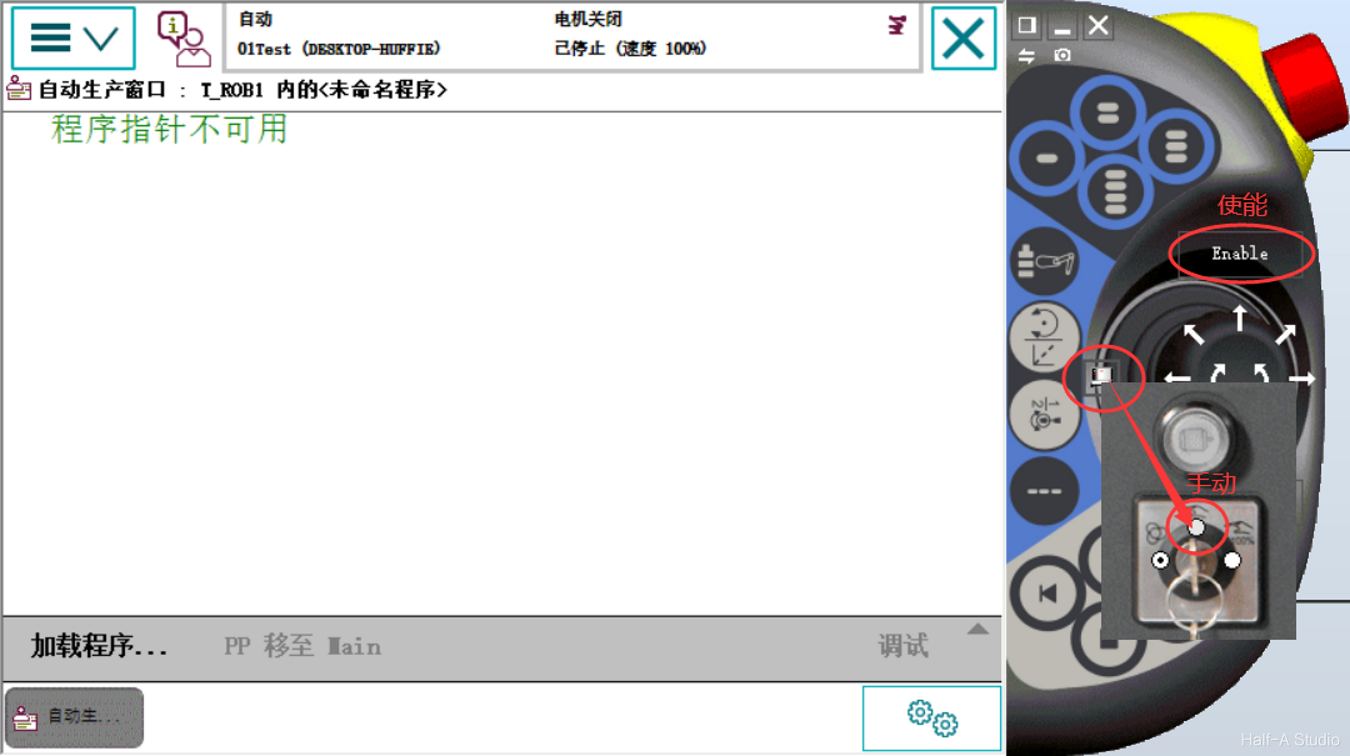
在弹出的示教器窗口,打开控制面板切换为手动并使能。
- 在机器人视图内,Ctrl+左键为平移,Ctrl+Shift+左键为旋转,调整视图,使虚拟示教器和机器人能够同时看到。
- 点击菜单-程序编辑器,新建一个程序。
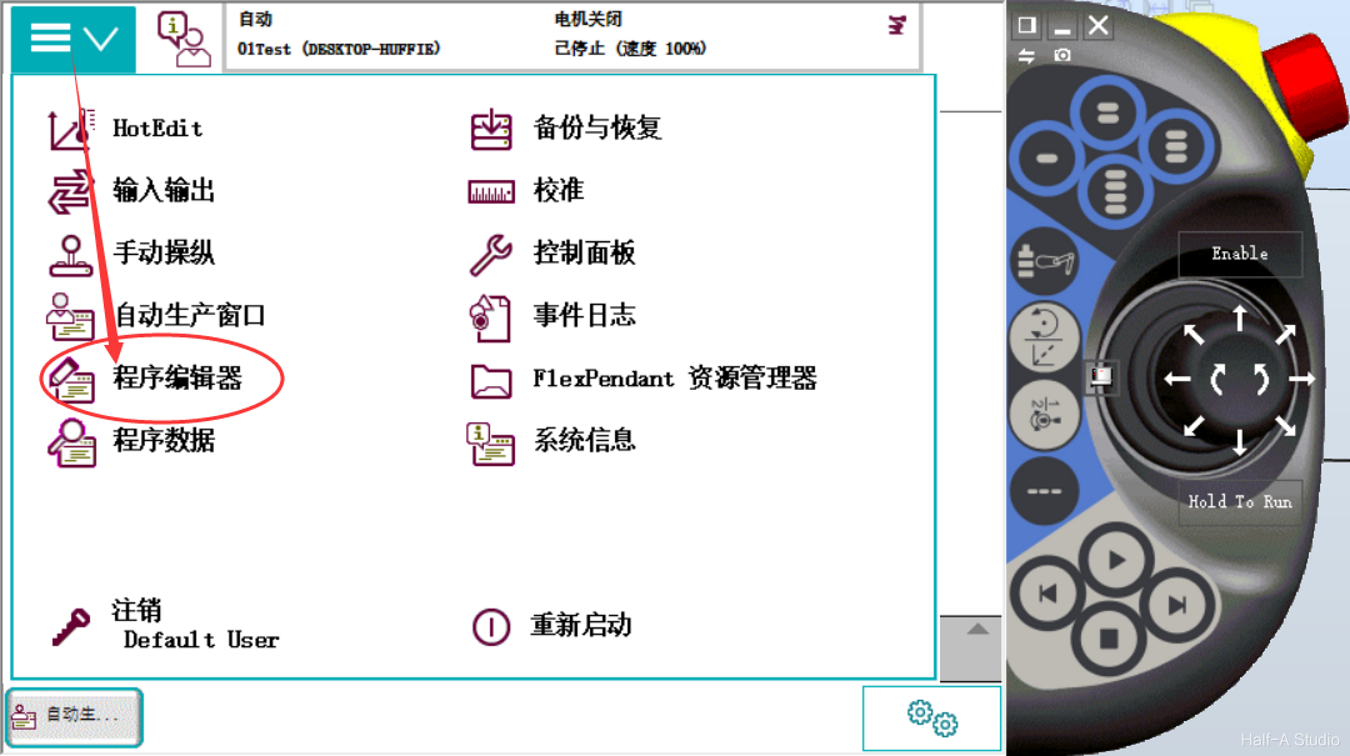
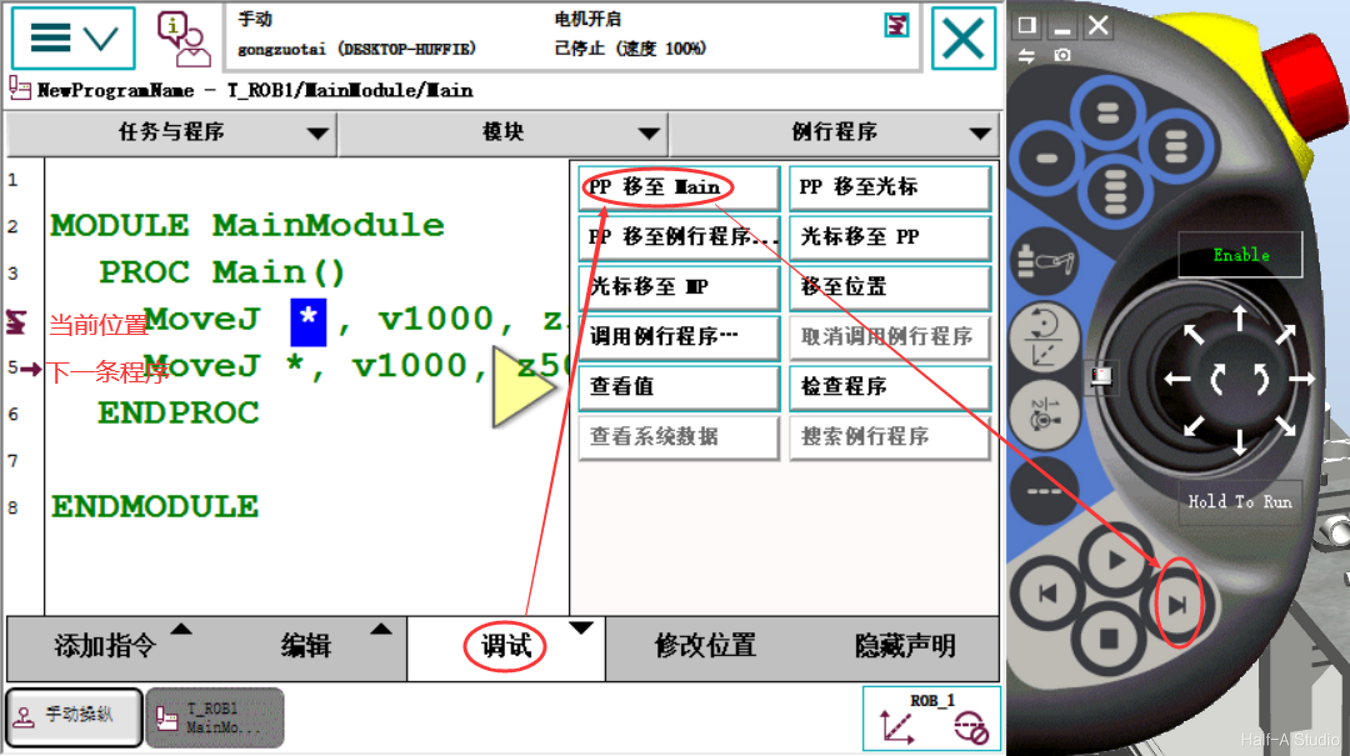
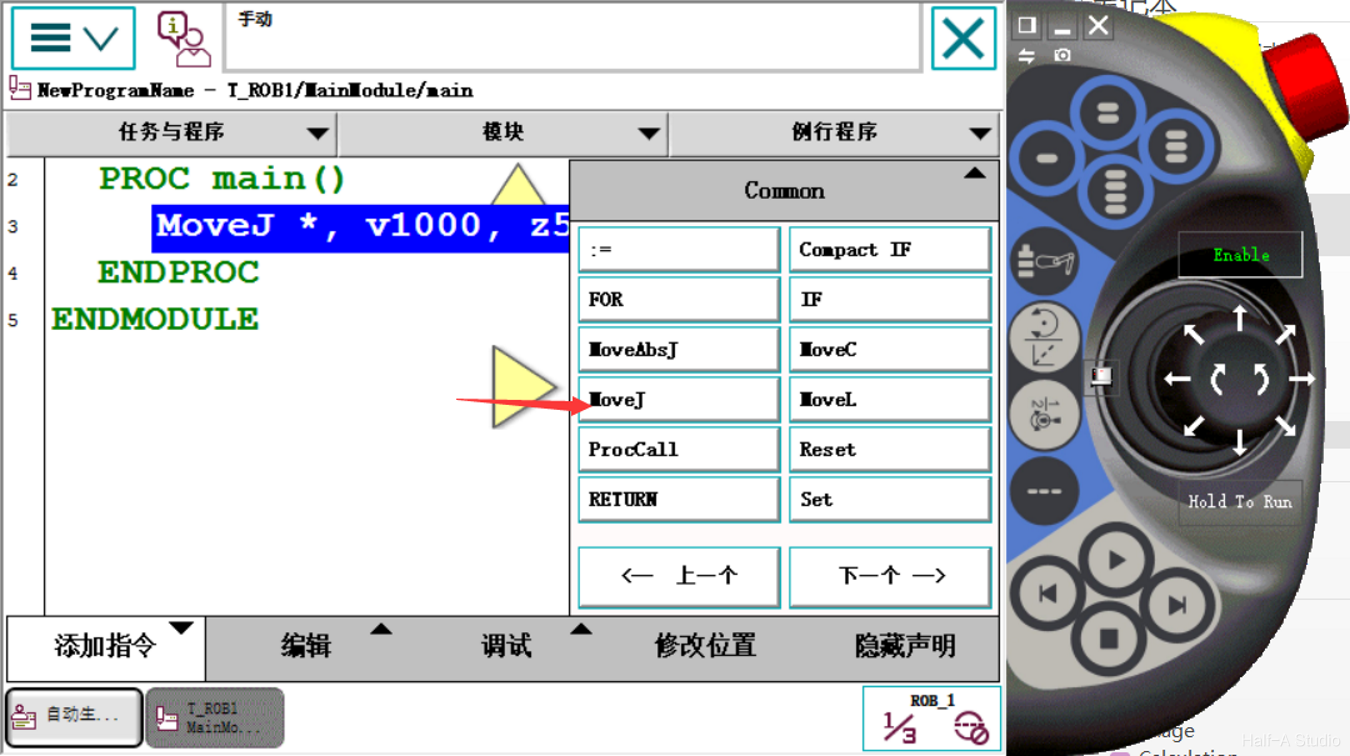
添加一条MoveJ指令
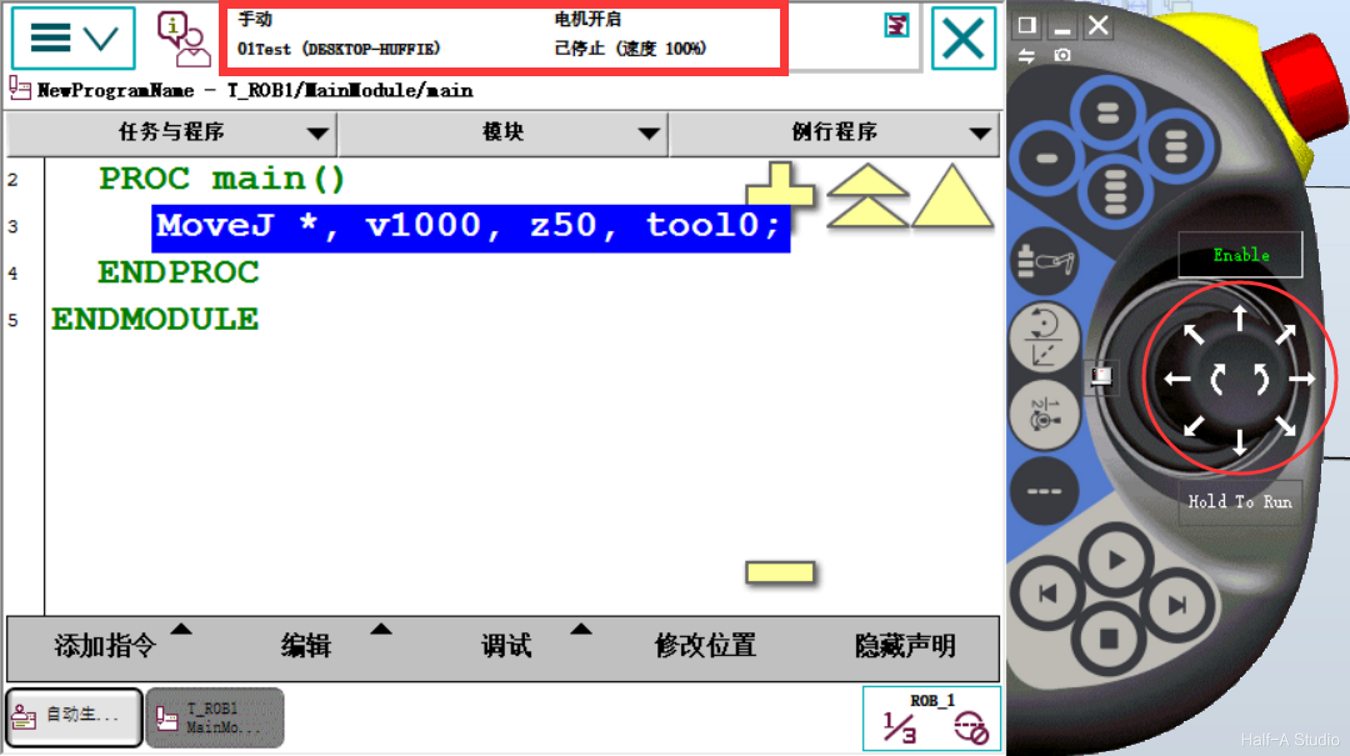
长按示教器右边的箭头,使机器人转动一个角度,然后在下方再添加一条MoveJ指令。(一定要看示教器上访的状态,保证机器人是手动控制模式、电机开启)
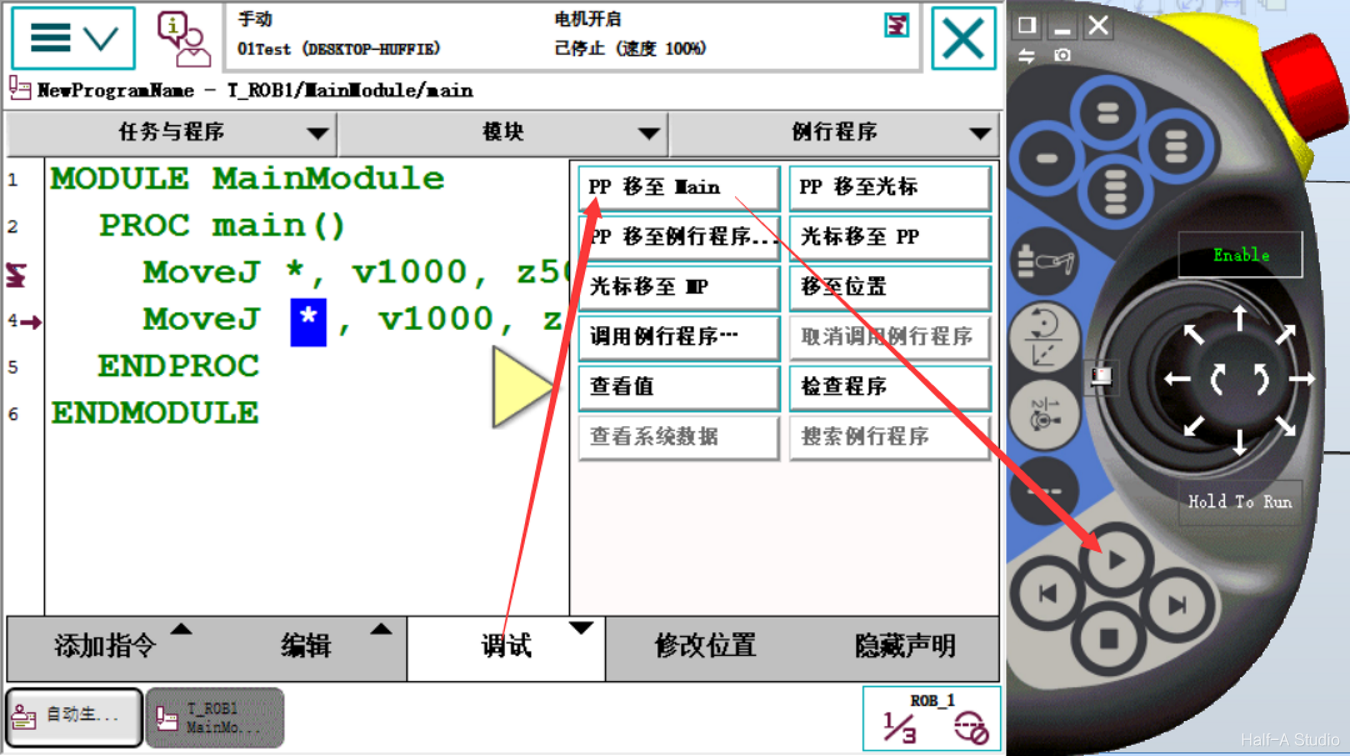
然后点击调试-PP移至Main,再点击右下方的运行按钮,即可看到机器人在起始位置和刚才转动的位置进行往复运动。
 微信支付
微信支付 支付宝
支付宝
评论