【RobotStudio学习笔记】(三)程序创建
1. 层级结构
打开主菜单-程序 可以看到最上面一行是程序名称,T_ROB1/MainModule/main。
其中T_ROB1是任务,有几个机械单元就有几个任务可以选择。比如两个机械臂协同工作,就会出现ROB2等。
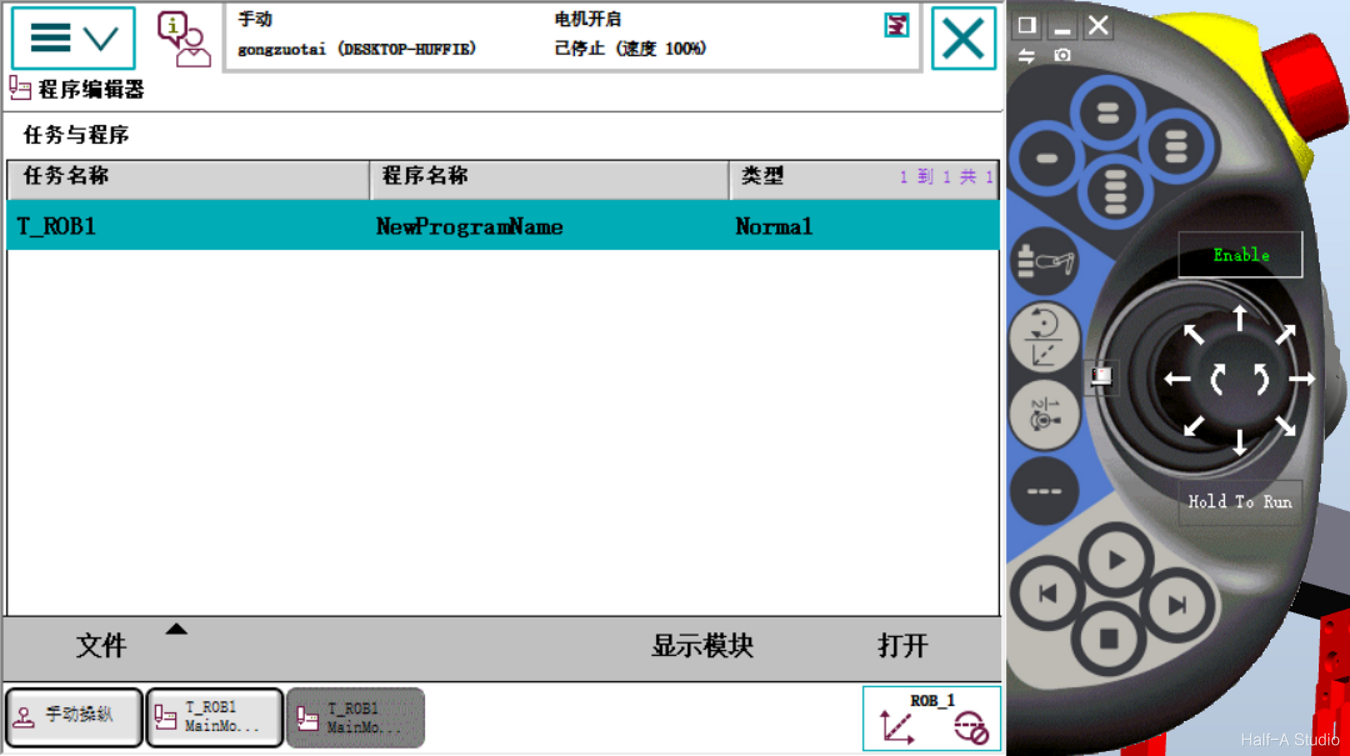
第二层是模块,分成系统模块和程序模块。模块就是将机器人需要实现的各个功能分成不同模块。可以理解成文件夹。
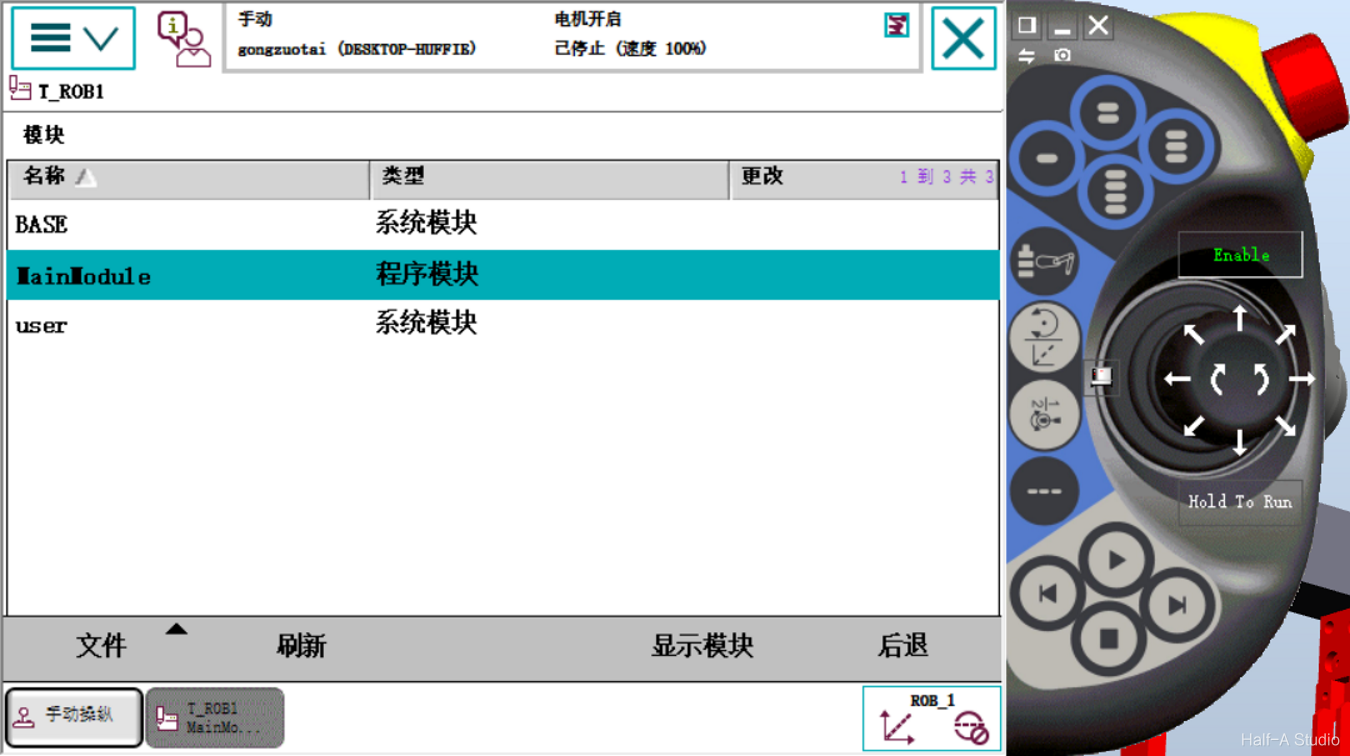
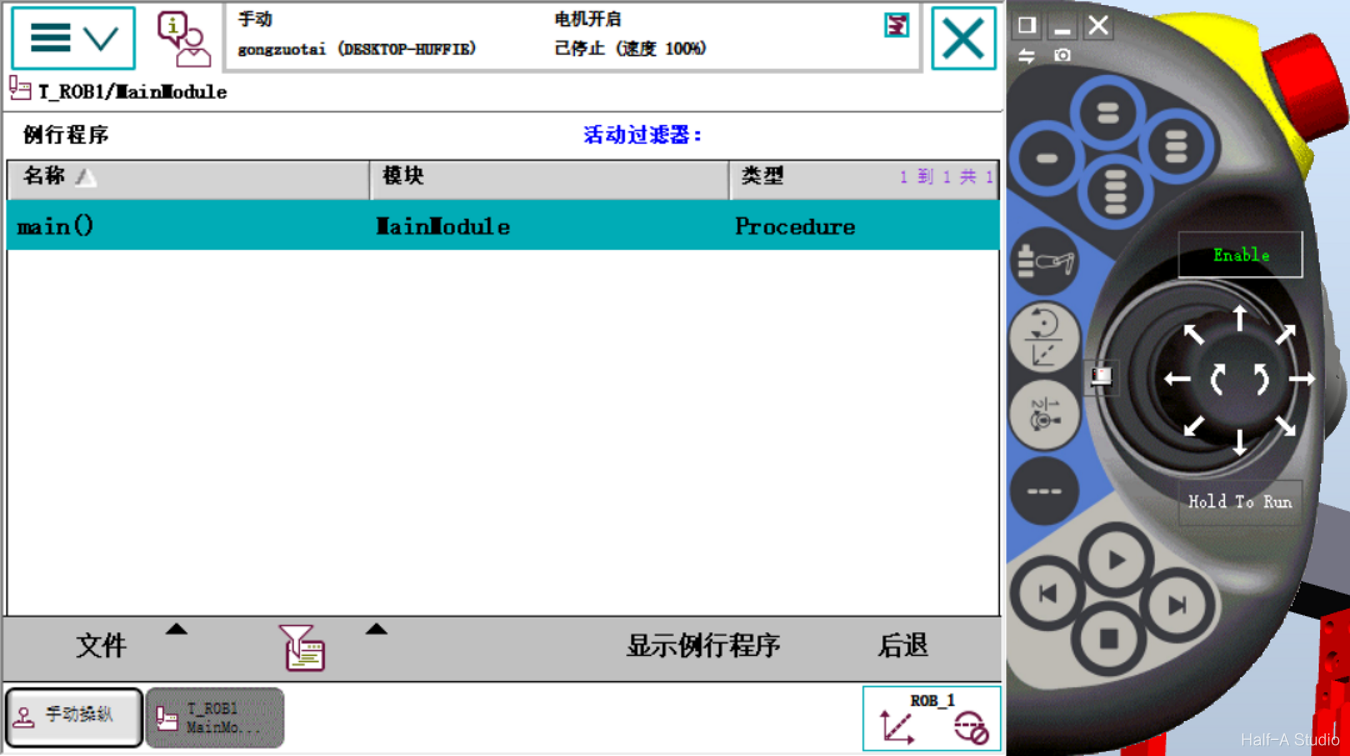
第三层是例行程序,是机器人系统真正执行的一些程序。
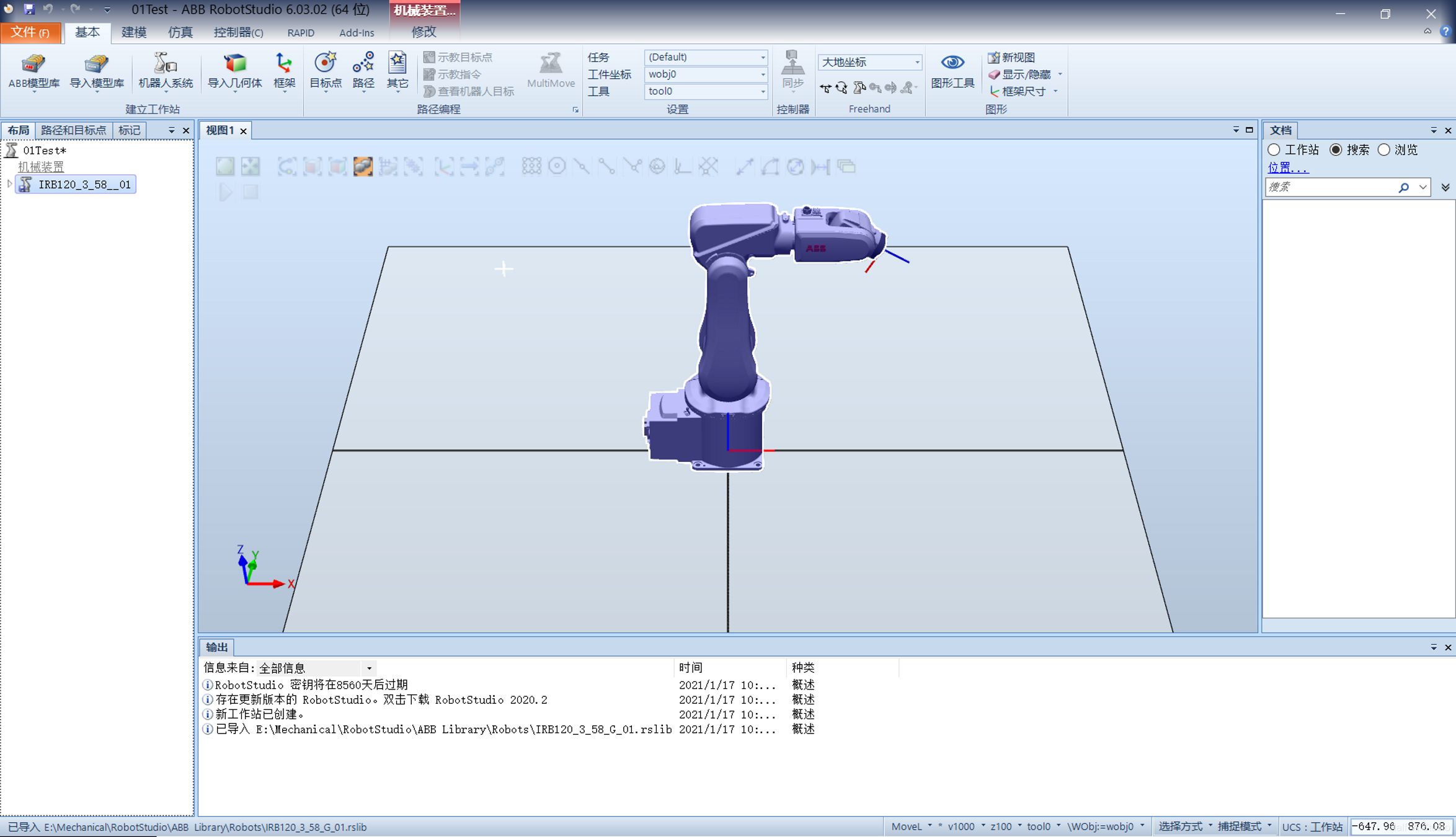
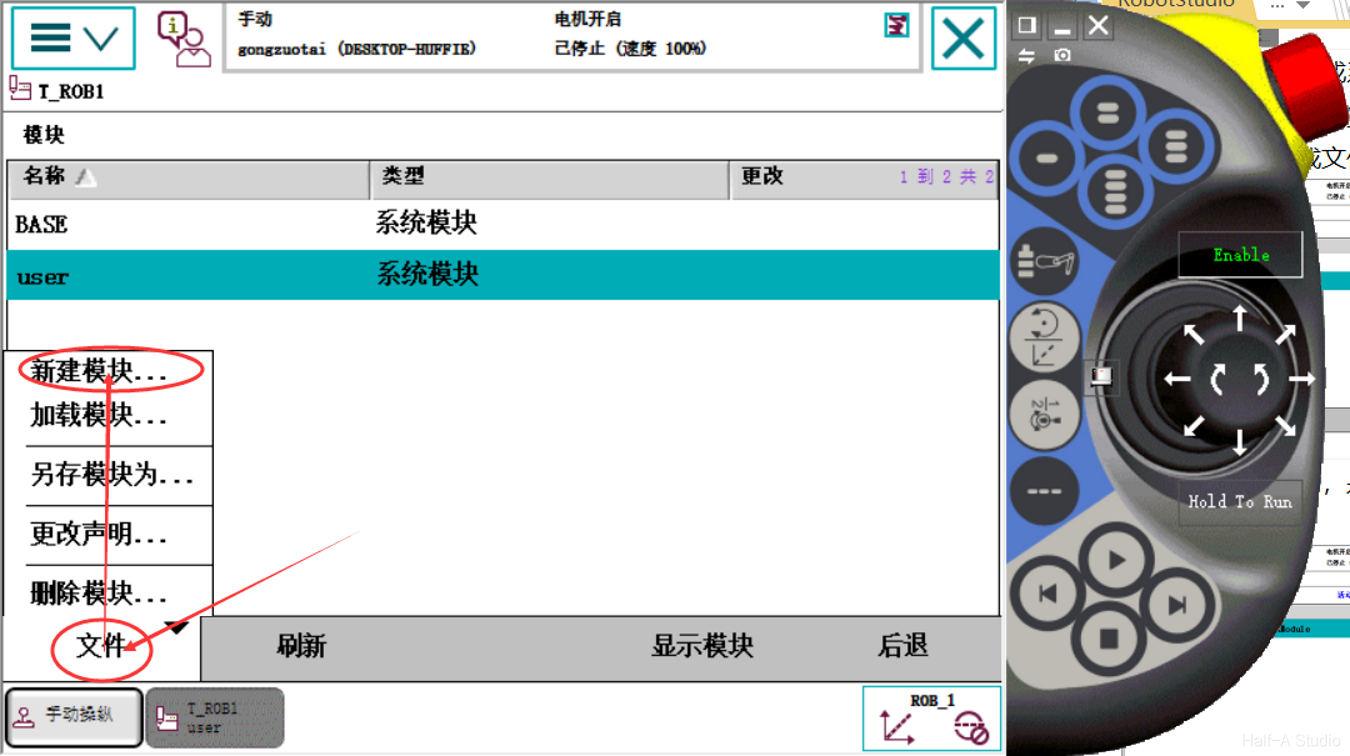
2. 新建程序
新建模块:点击文件-新建模块。
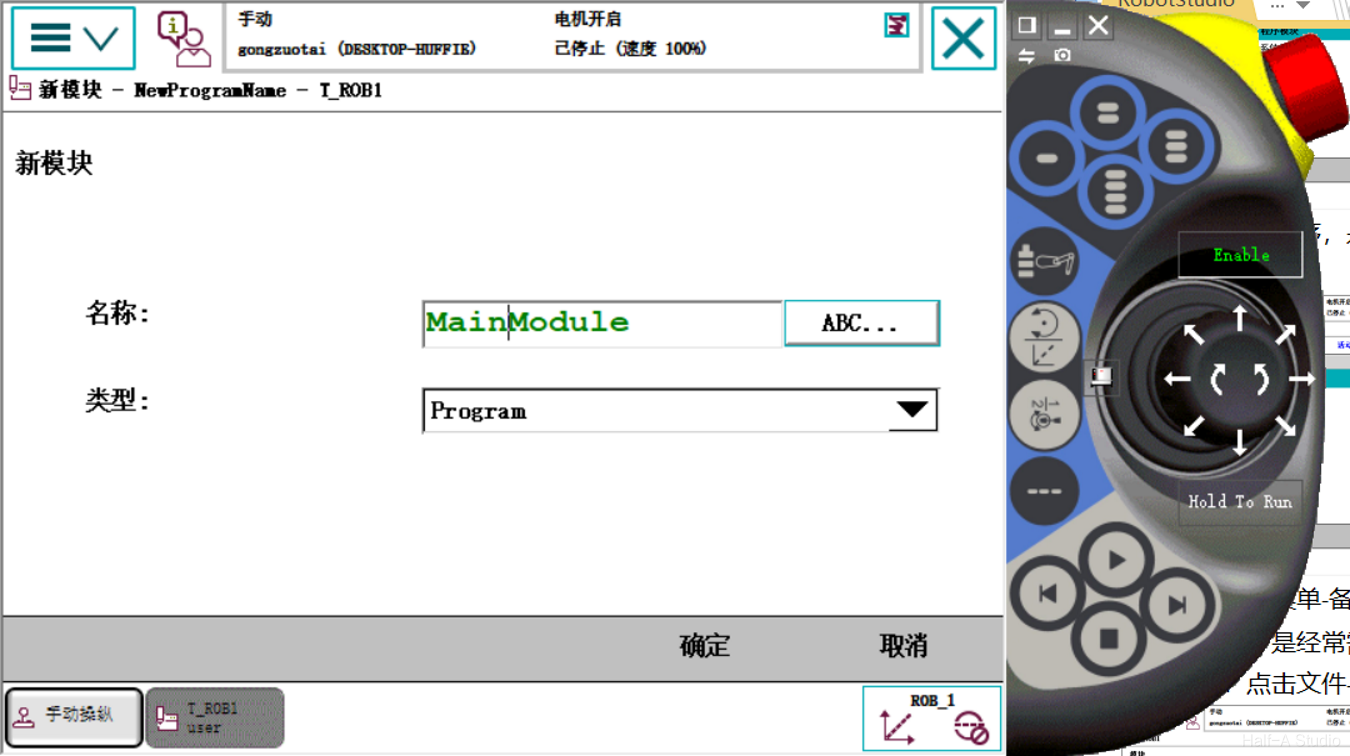
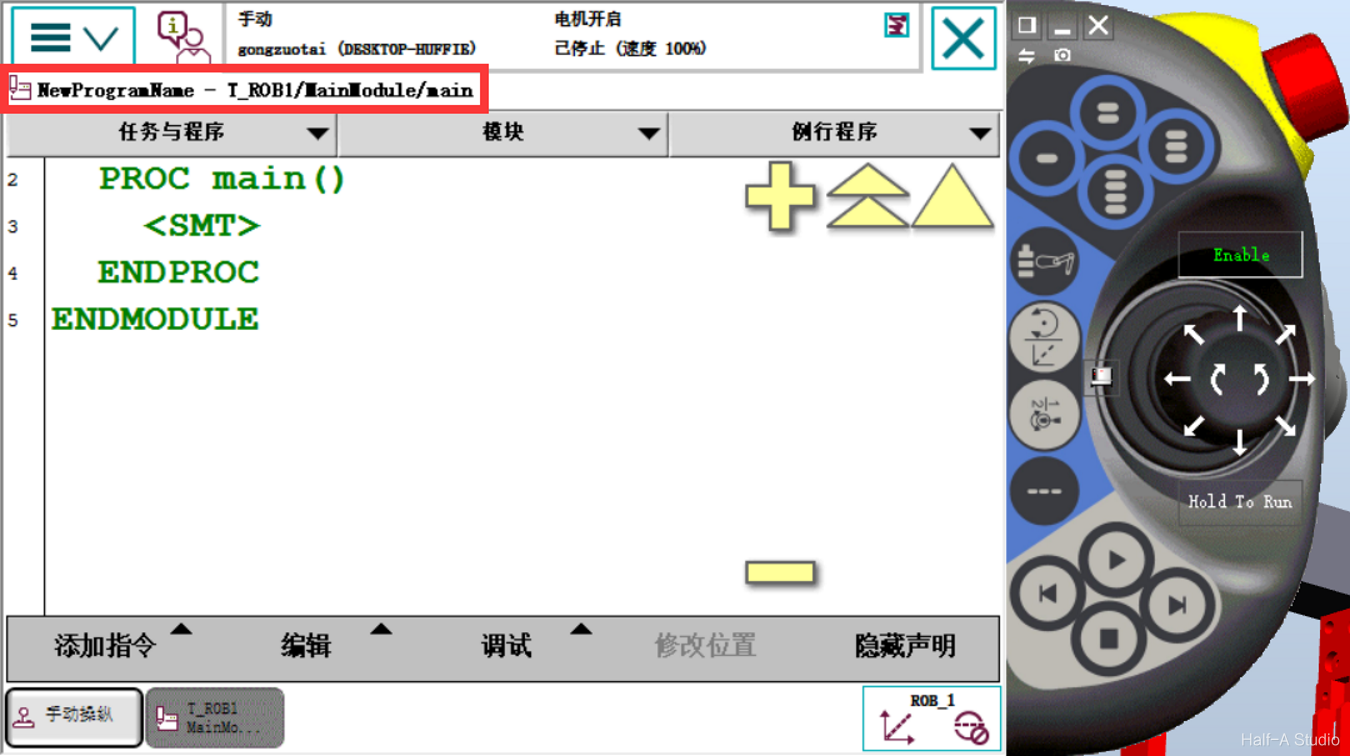
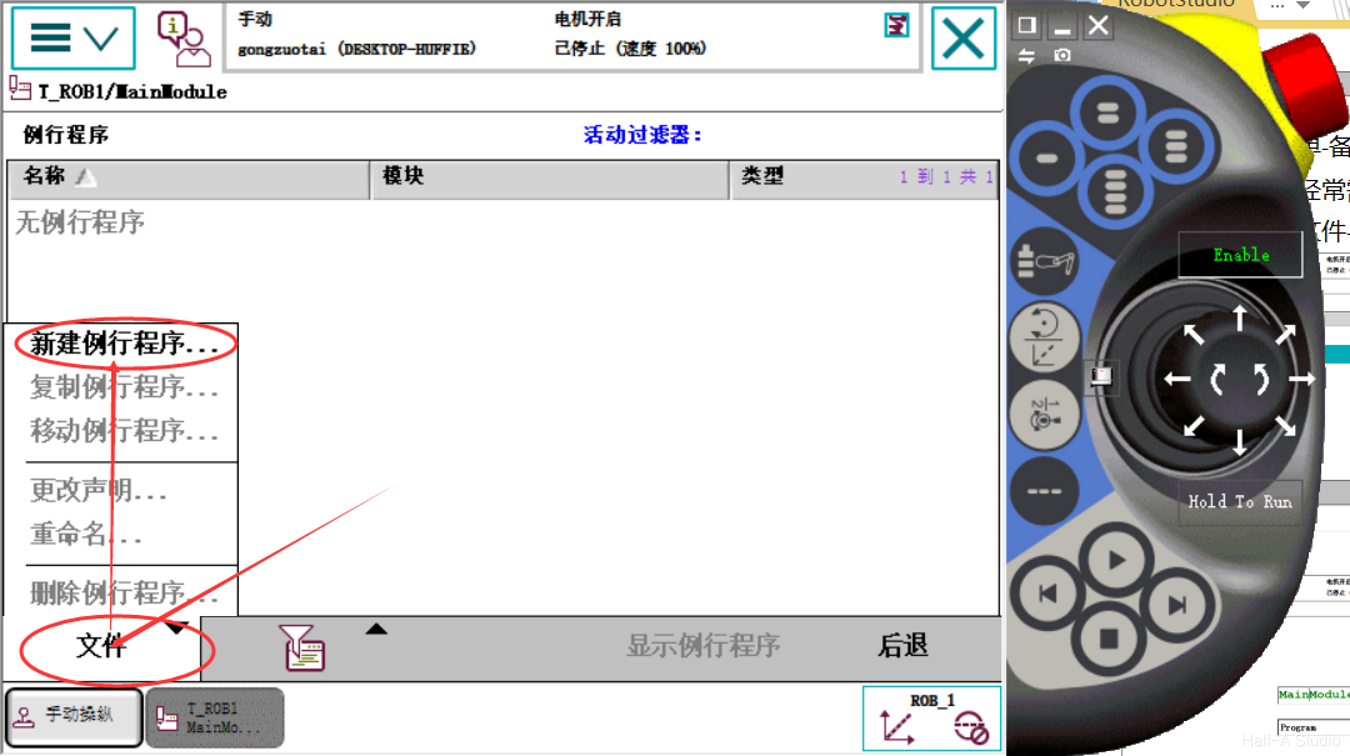
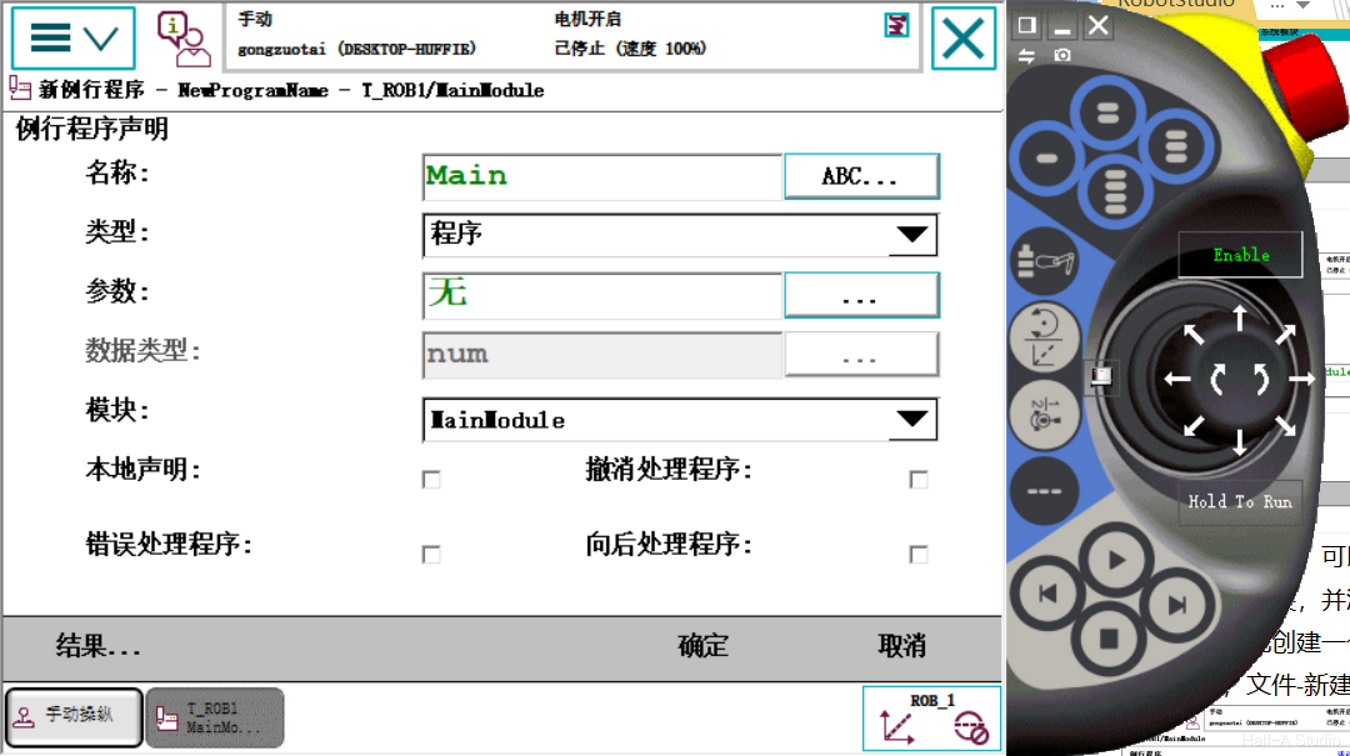
进入新建的模块,可以看到现在的模块只是相当于一个文件夹,并没有创建程序的地方。所以我们需要先创建一个例行程序。点击右上方例行程序,文件-新建例行程序。
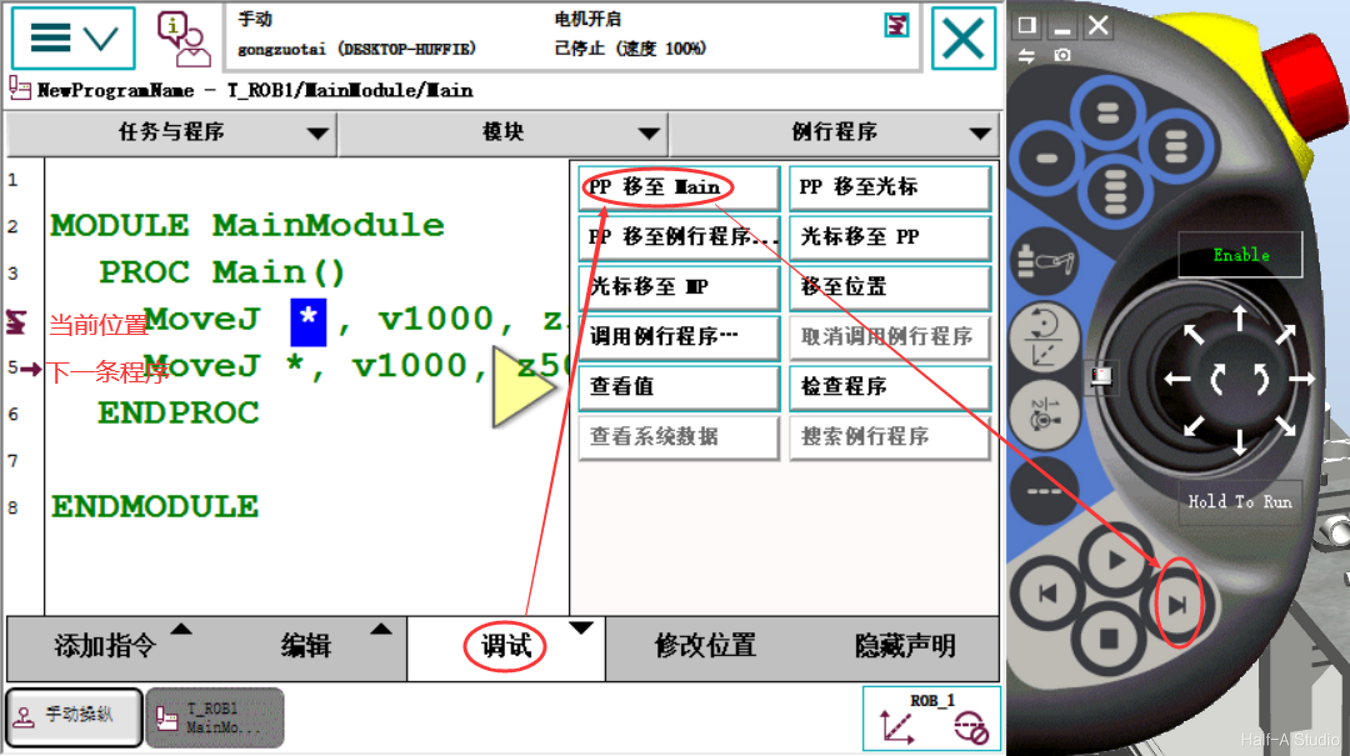
点击显示例行程序,就可以进入到程序编辑页面了。
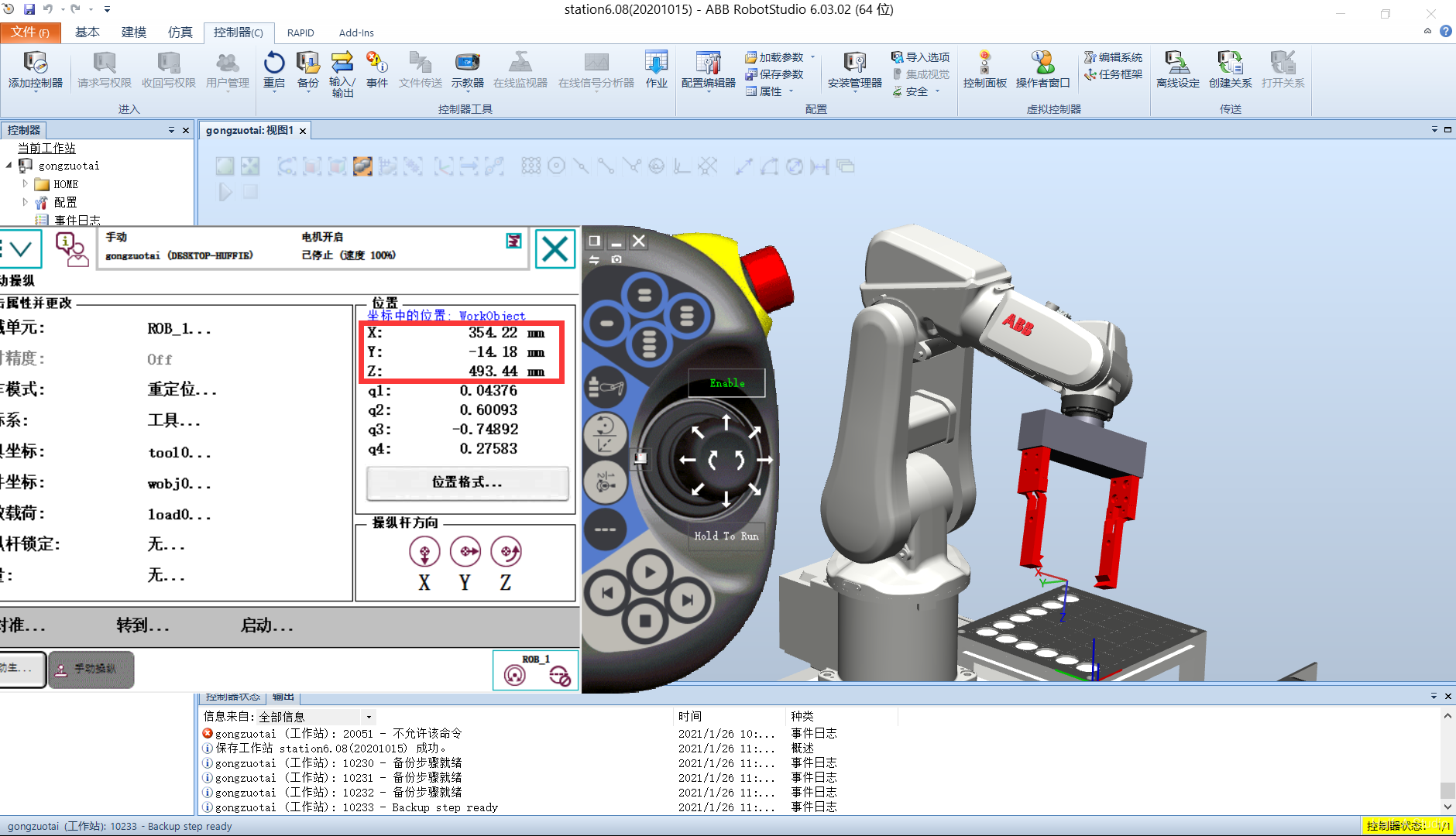
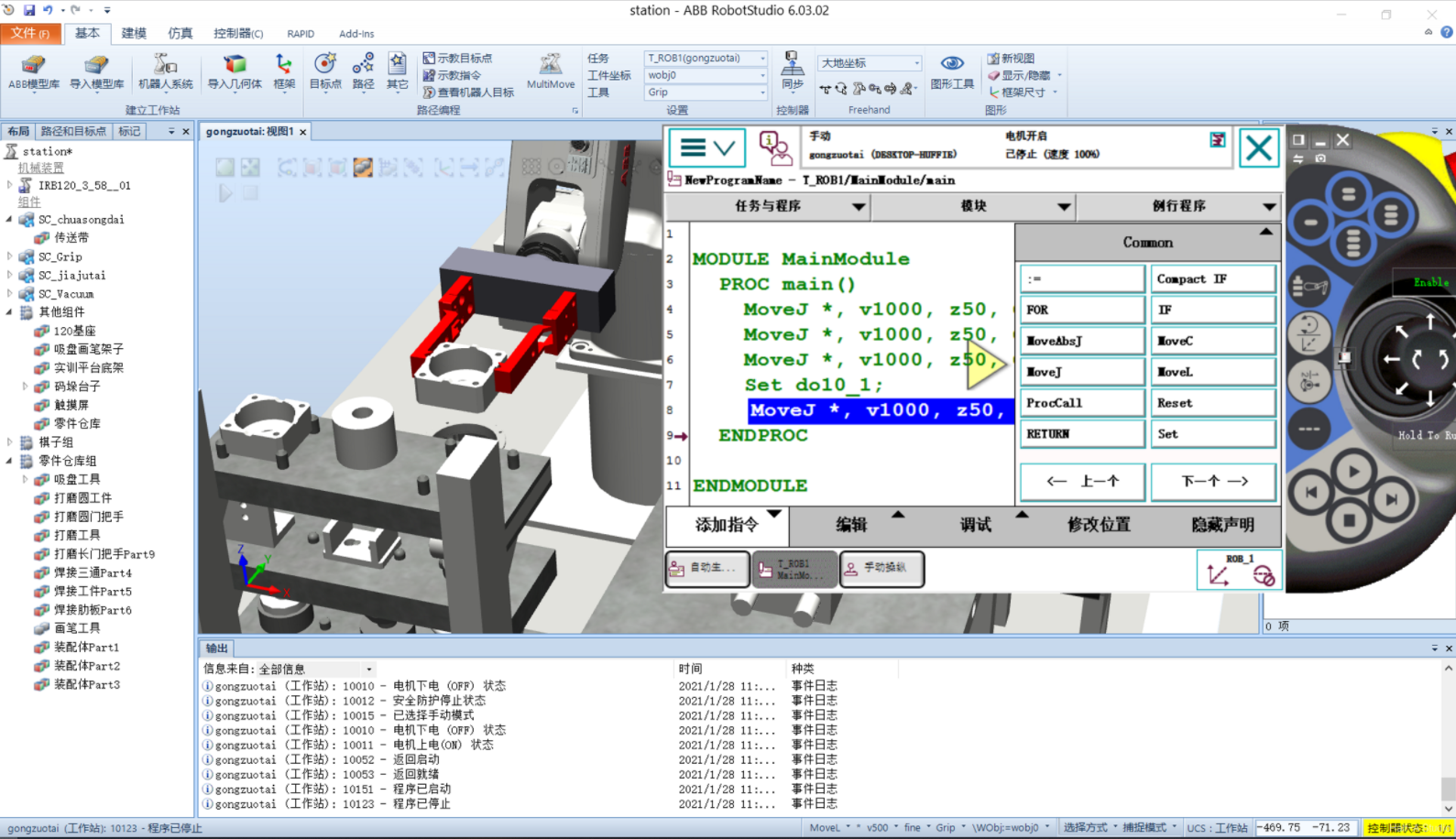
把当前位置记录下来,使用添加指令-MoveJ指令。
将机器人移动至另一个位置,再次添加MoveJ指令。点击调试-pp移至Main,点击右边的单步执行,可以看到机器人进行了一步移动。
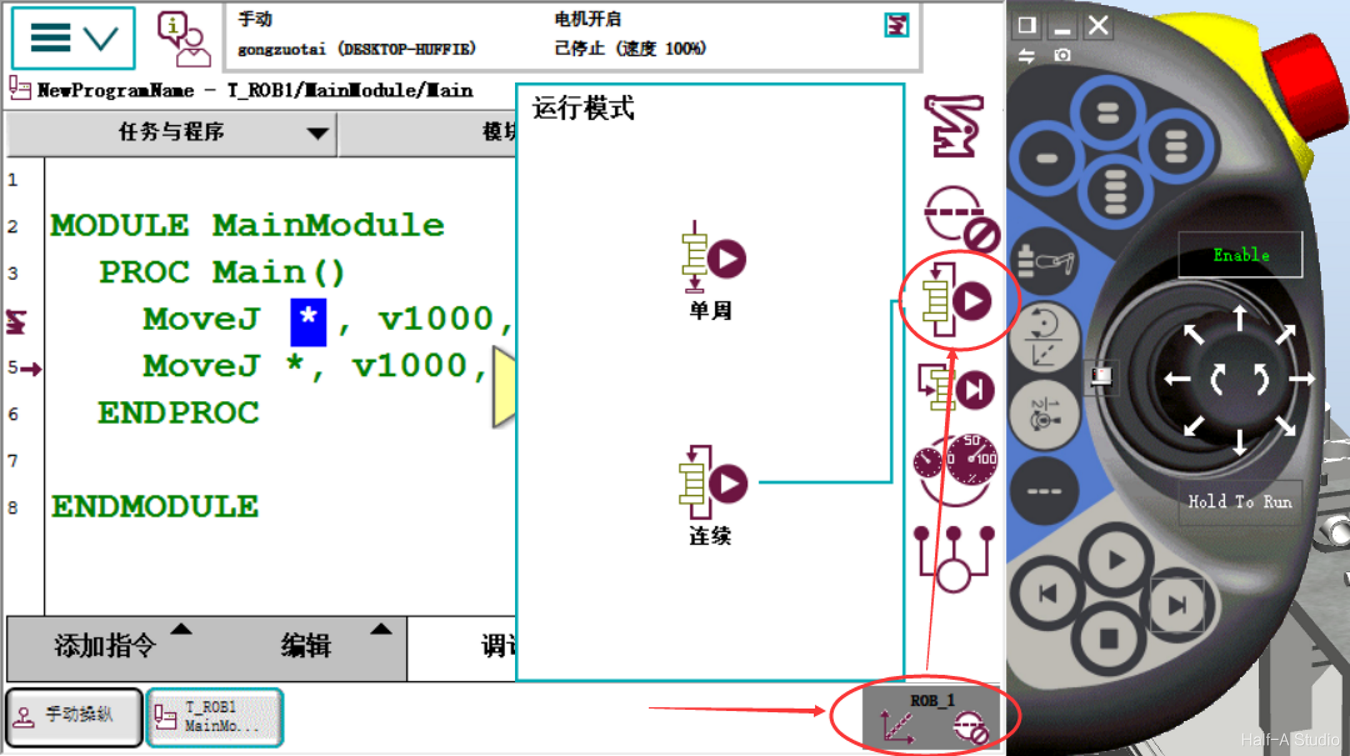
同时,程序可以切换单周执行与连续执行。
 微信支付
微信支付 支付宝
支付宝
评论