【RobotStudio学习笔记】(四)夹取工件程序设计
一、指令
- MoveJ:移动到某位置
- Set/Reset:控制外部设备
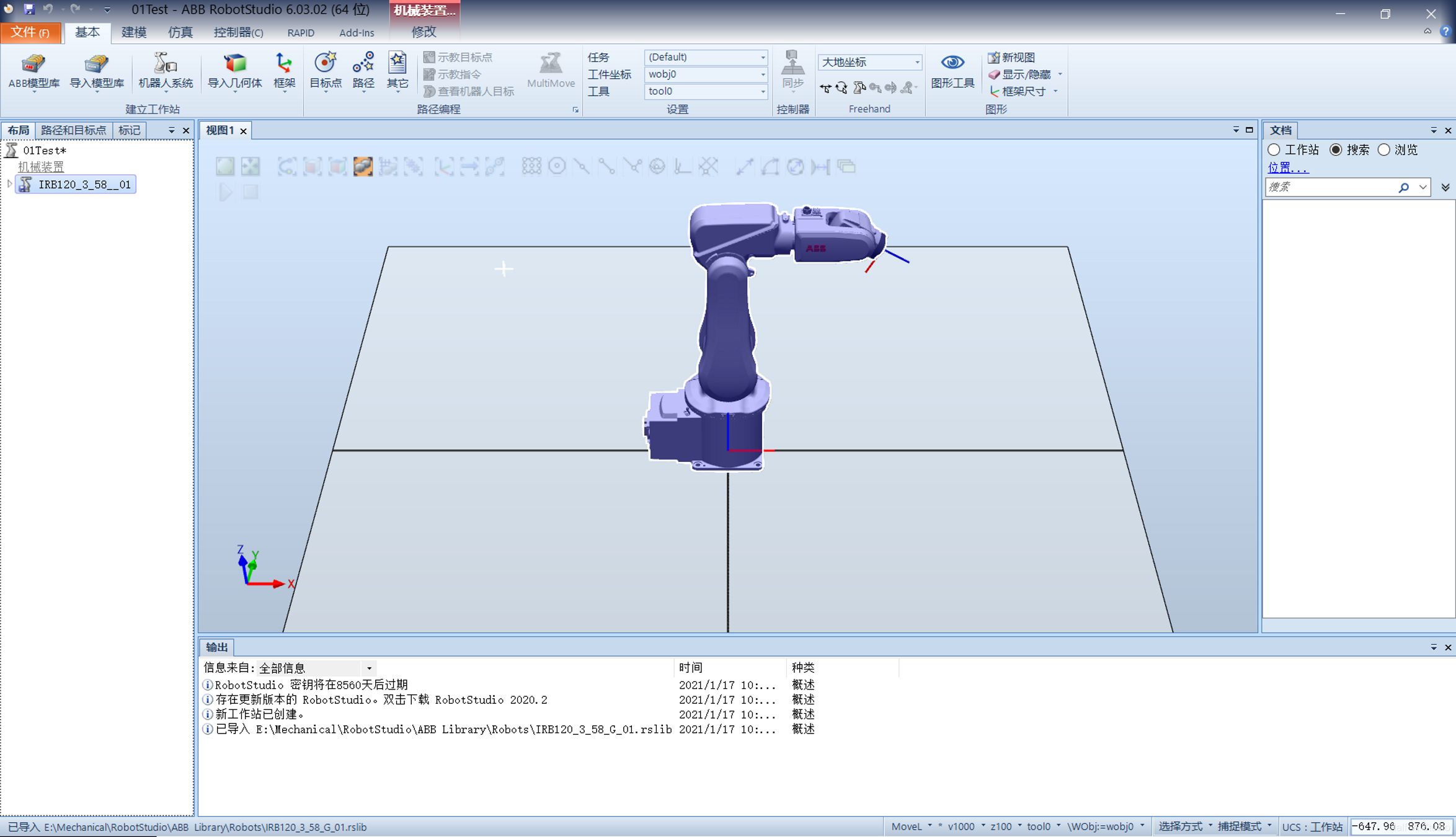
二、实现过程
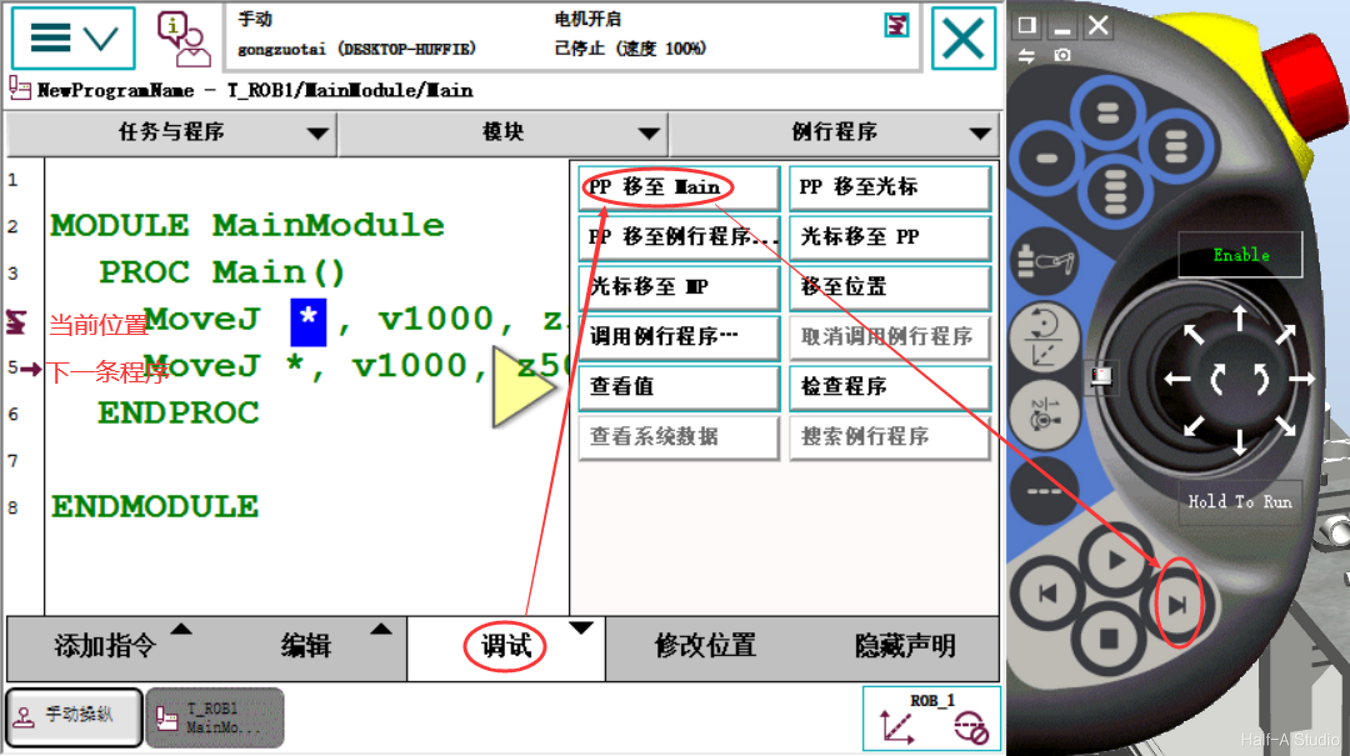
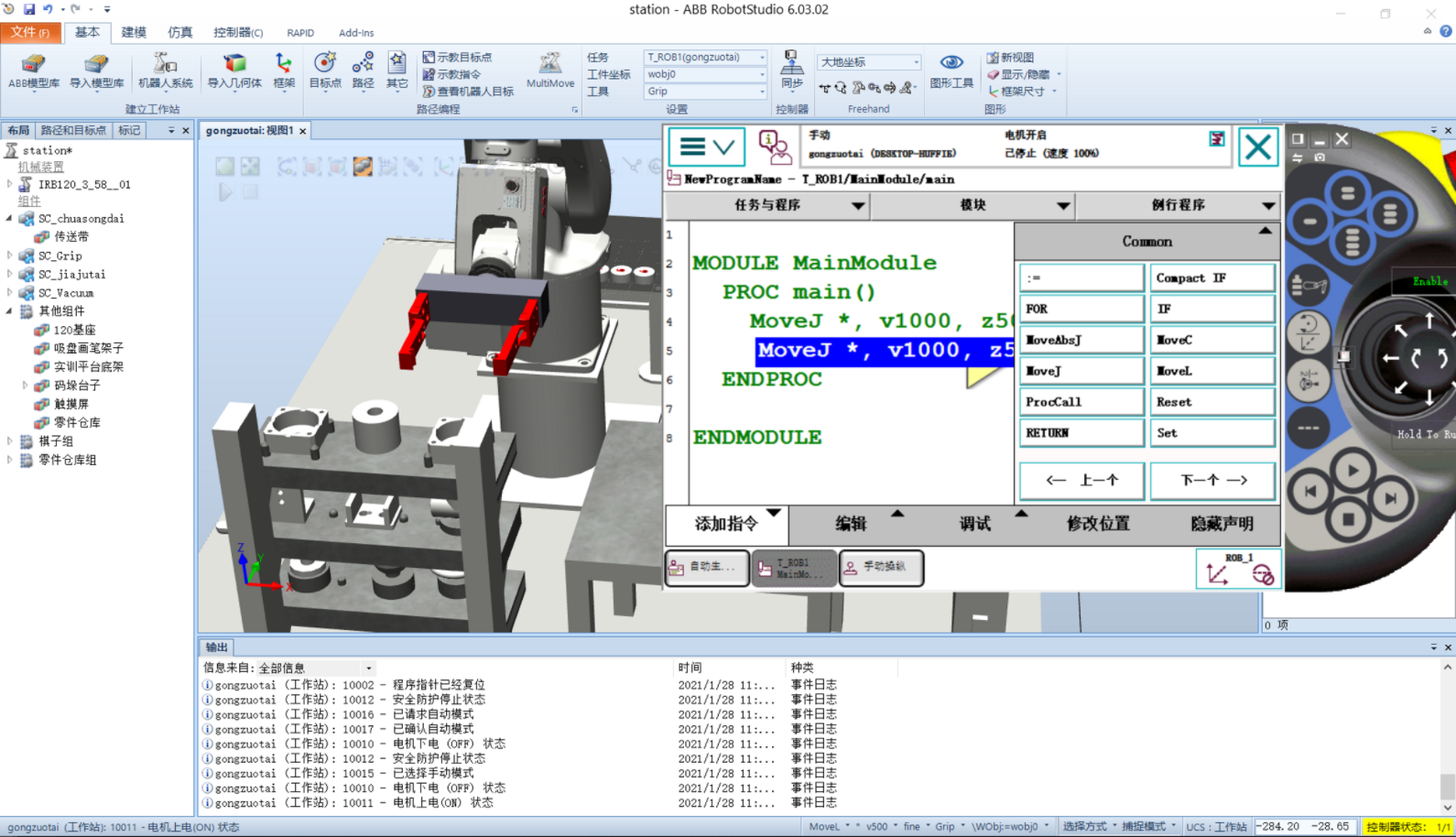
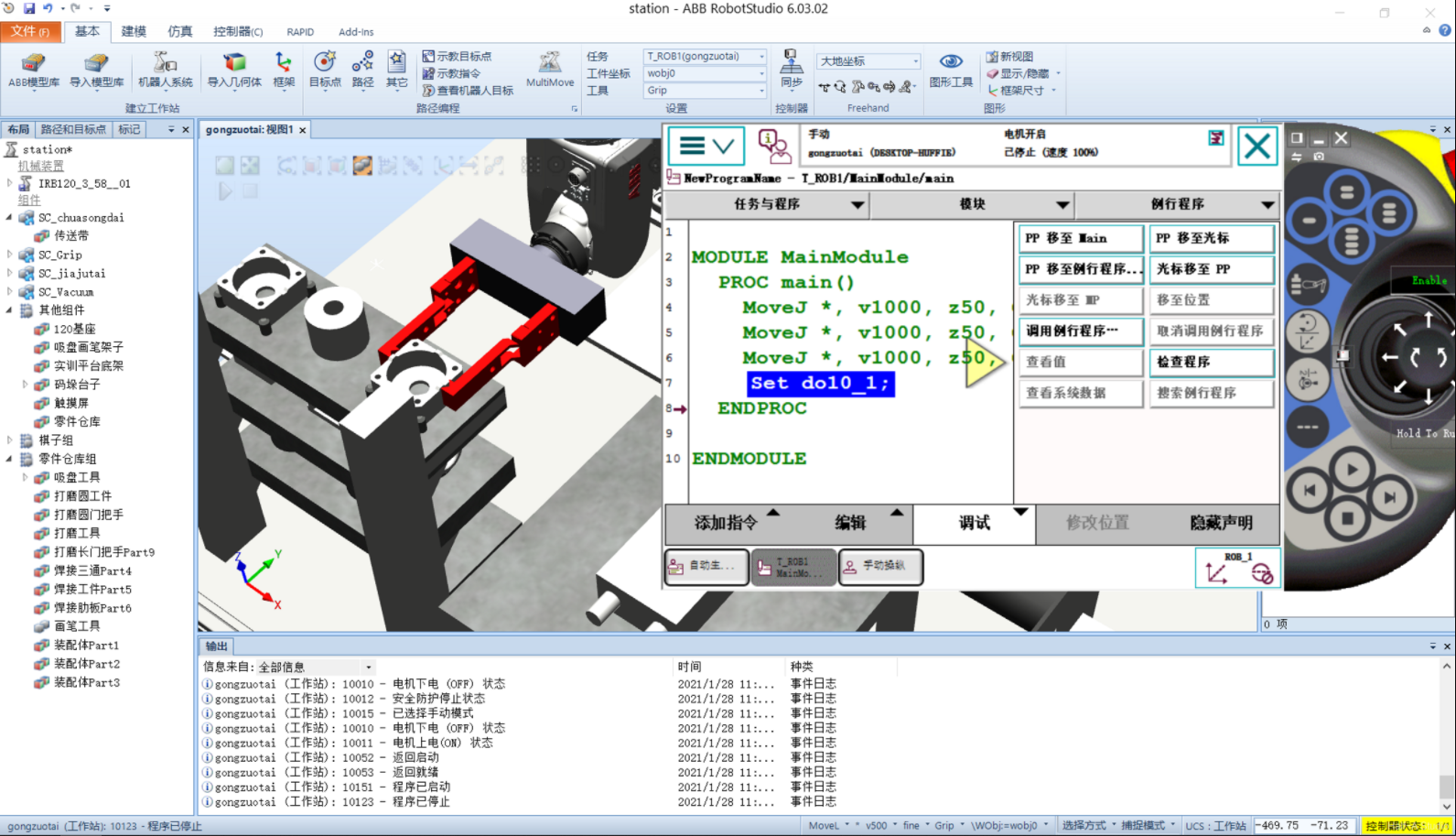
- 在初始位置添加一句MoveJ指令

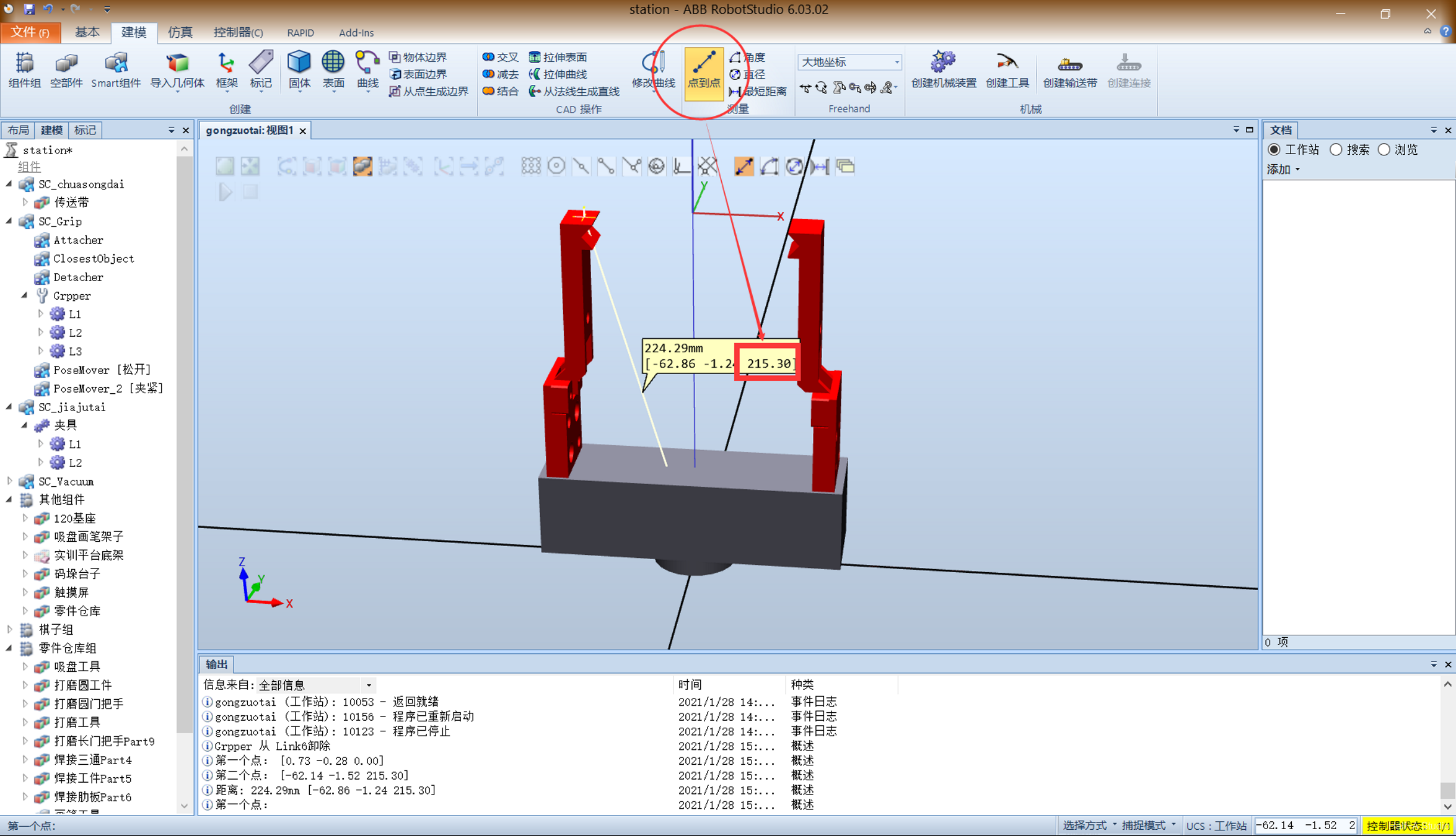
- 将机器人爪调至工件的正上方,再添加一条MoveJ指令(在工件上方添加一个位置点,是为了防止机器人直接夹取,可能会从侧面撞到工件)
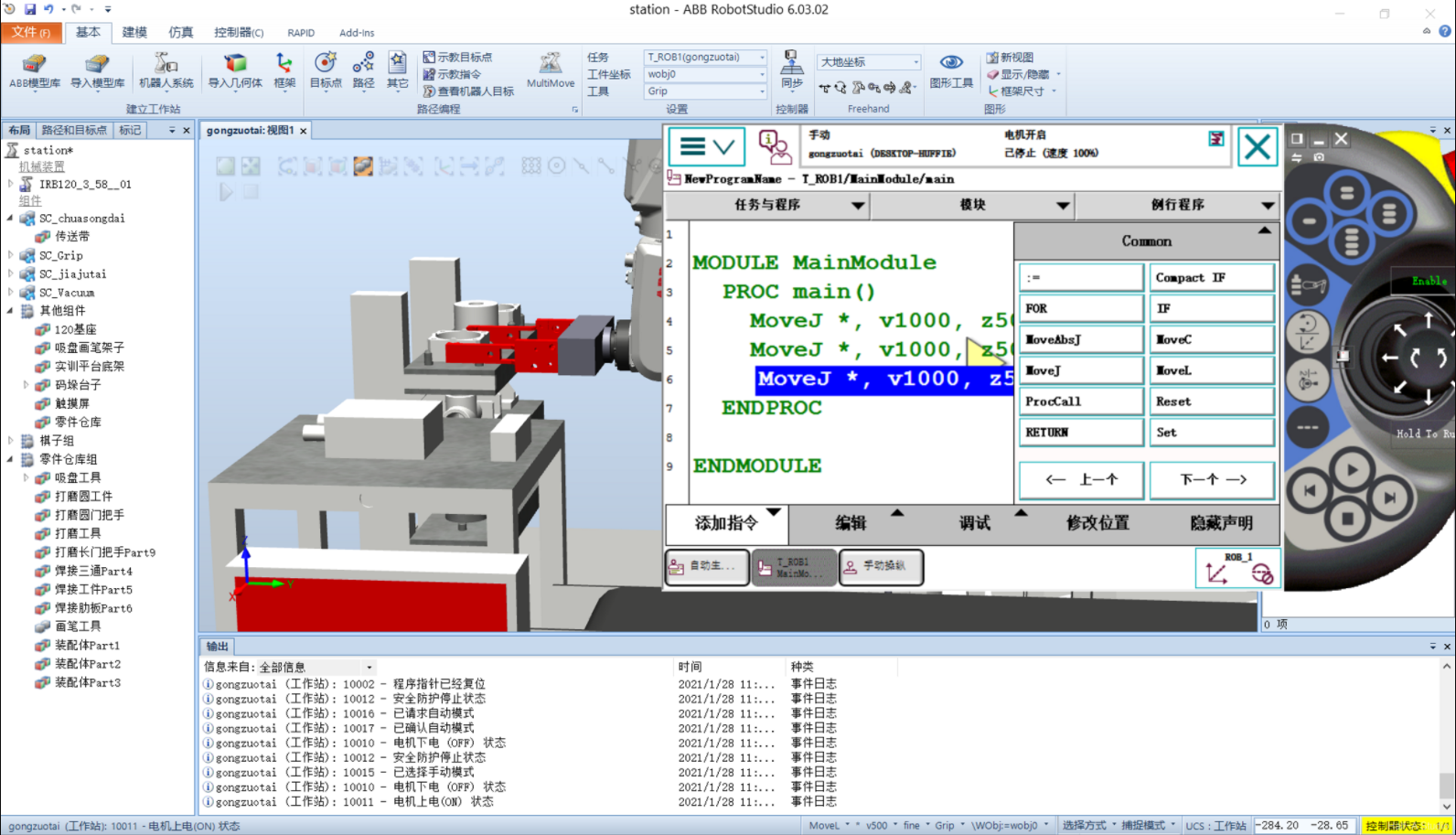
- 将机器人爪子向下移动到夹取工件的位置,添加一条MoveJ指令
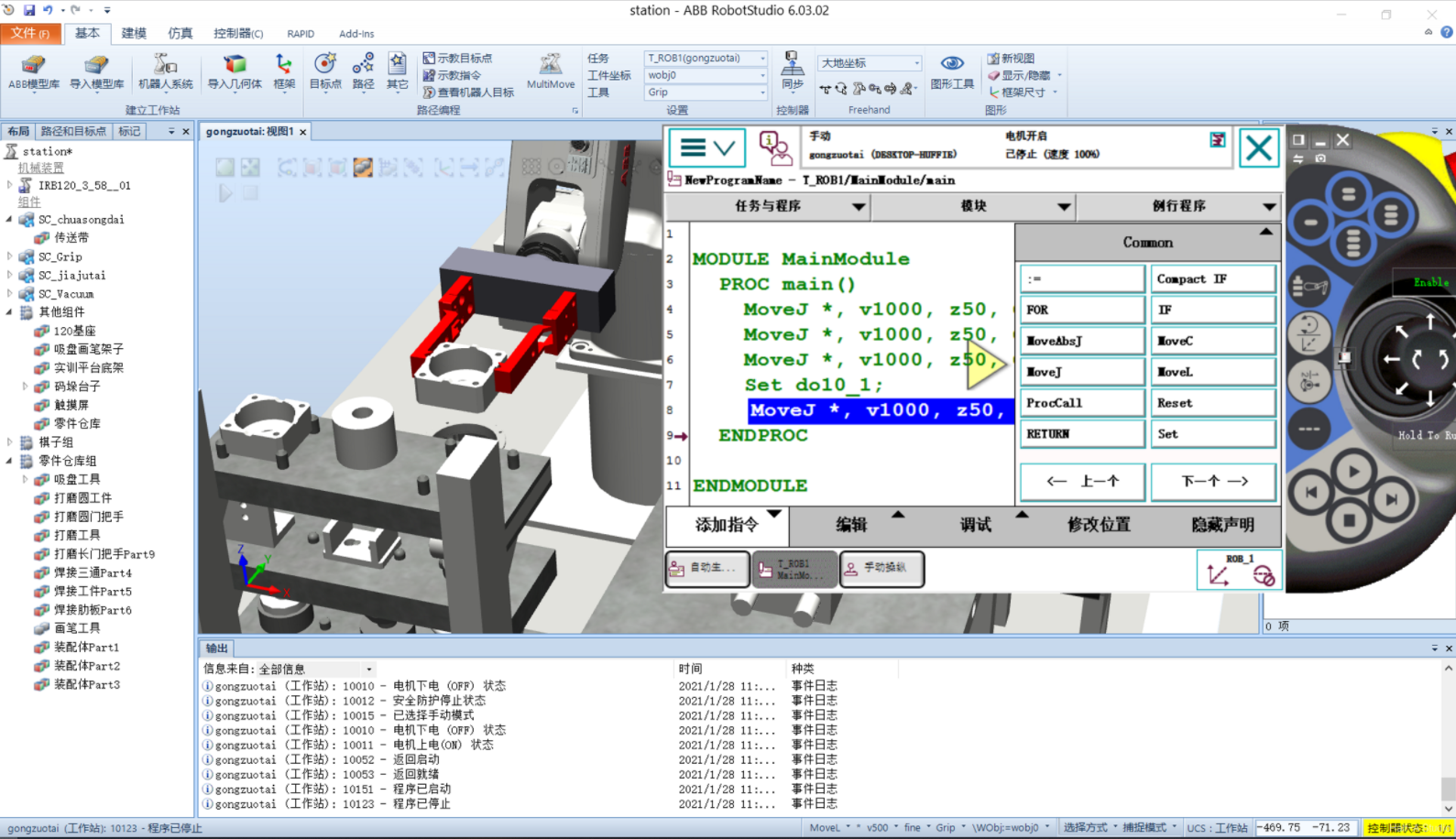
- 使用Set指令,使机器人爪子夹紧工件。
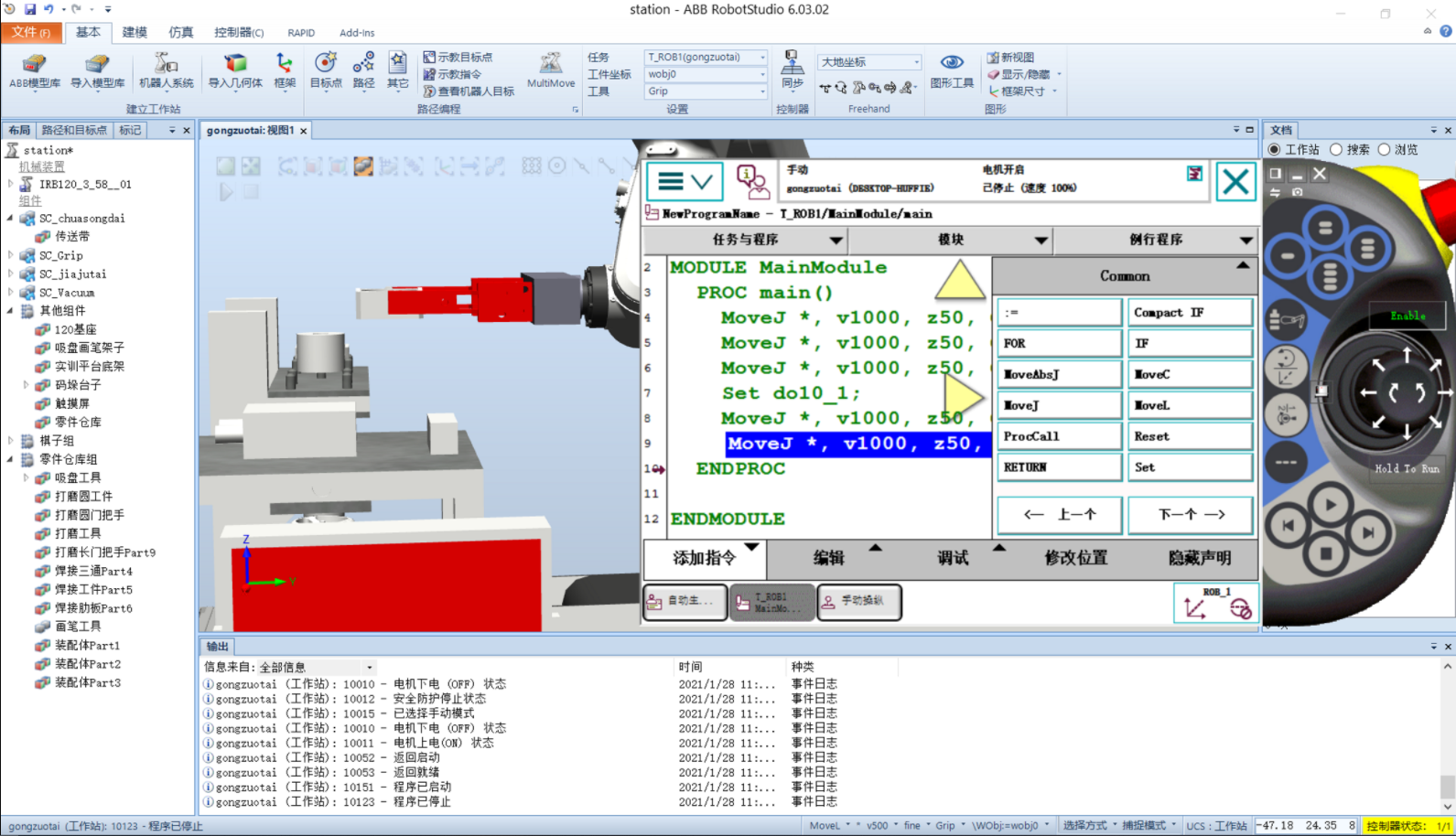
- 将机器人竖直向上移动,使工件脱离工作台,添加一条MoveJ指令。
- 将工件移动到夹具台上方,再次添加一条MoveJ指令。
- 将工具放到工作台上,添加一条MoveJ指令,再使用Reset指令松开夹爪。
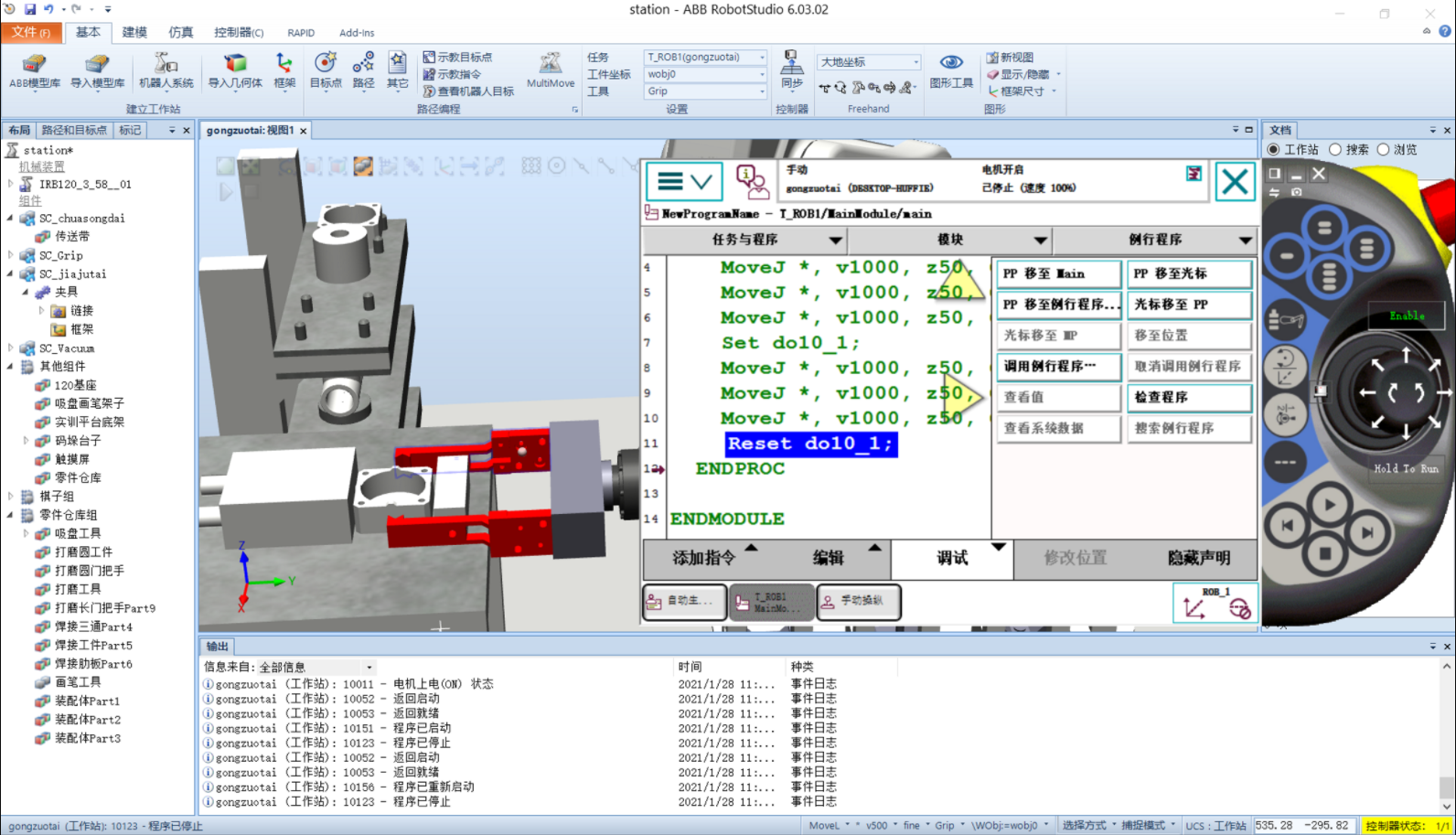
- 使用MoveJ指令将机器人先竖直向上移动,再回到初始位置,即可完成一个动作周期。
三、增强代码可读性-创建robtarget数据
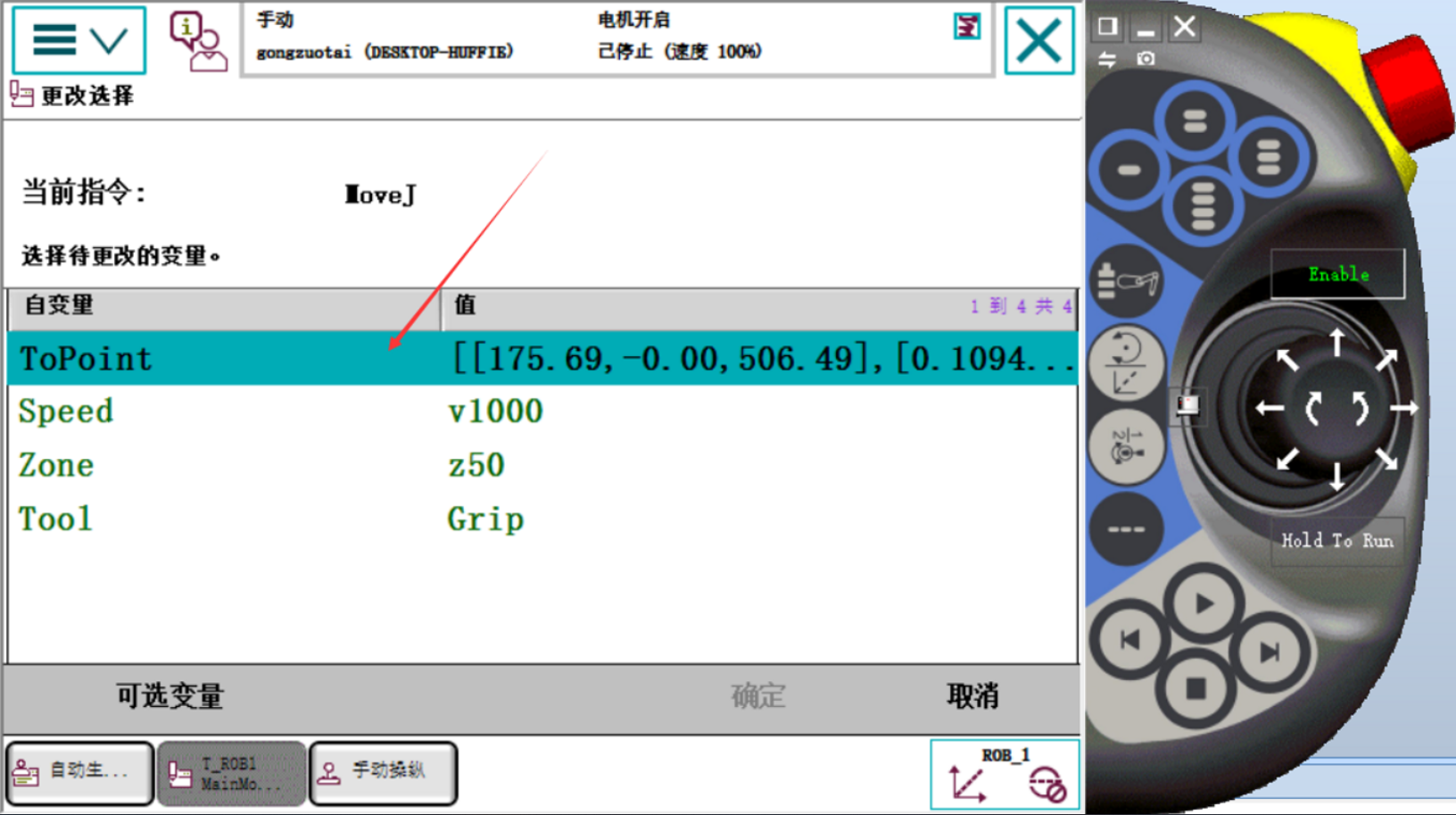
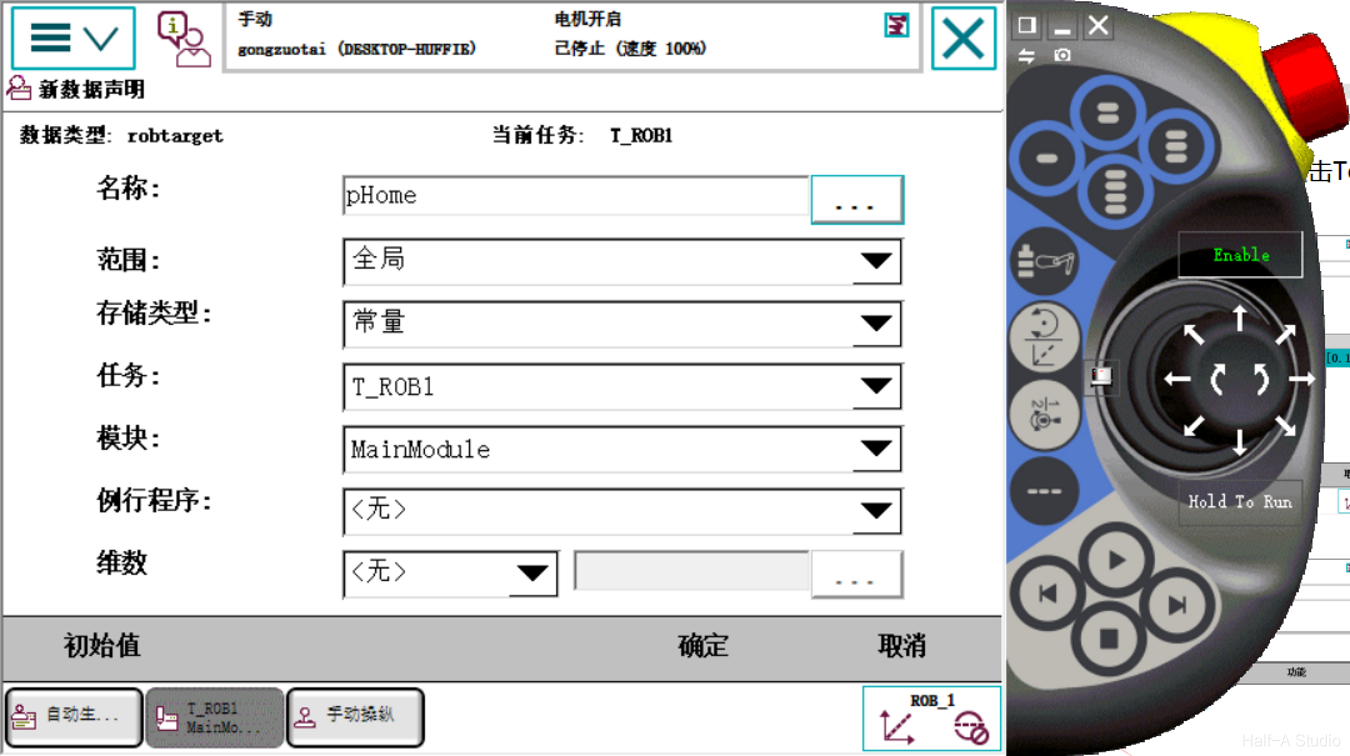
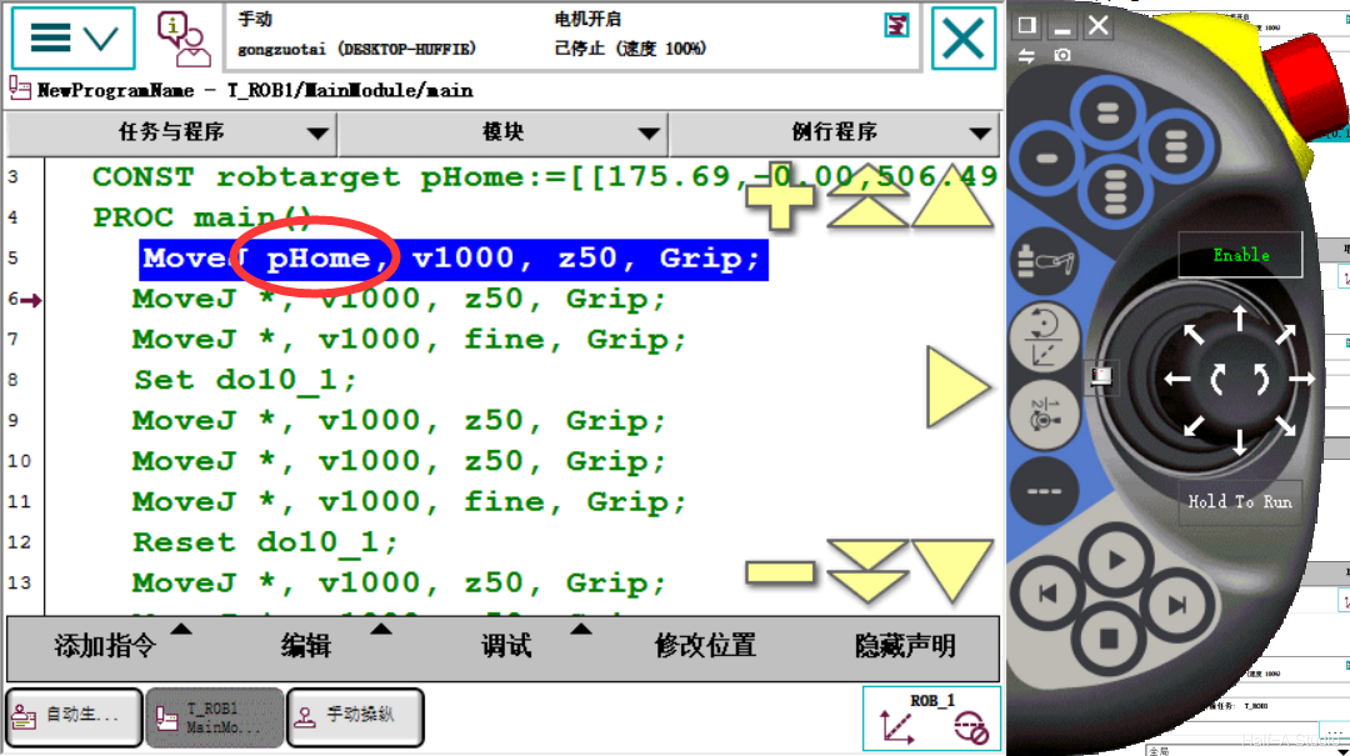
点击MoveJ指令后的*,点击ToPoint,点击新建,即可创建一个robotarget数据,代替*所在位置,增强程序的可读性。
(注意,新建robtarget数据时,是记录机器人现在位置,而非原指位置)

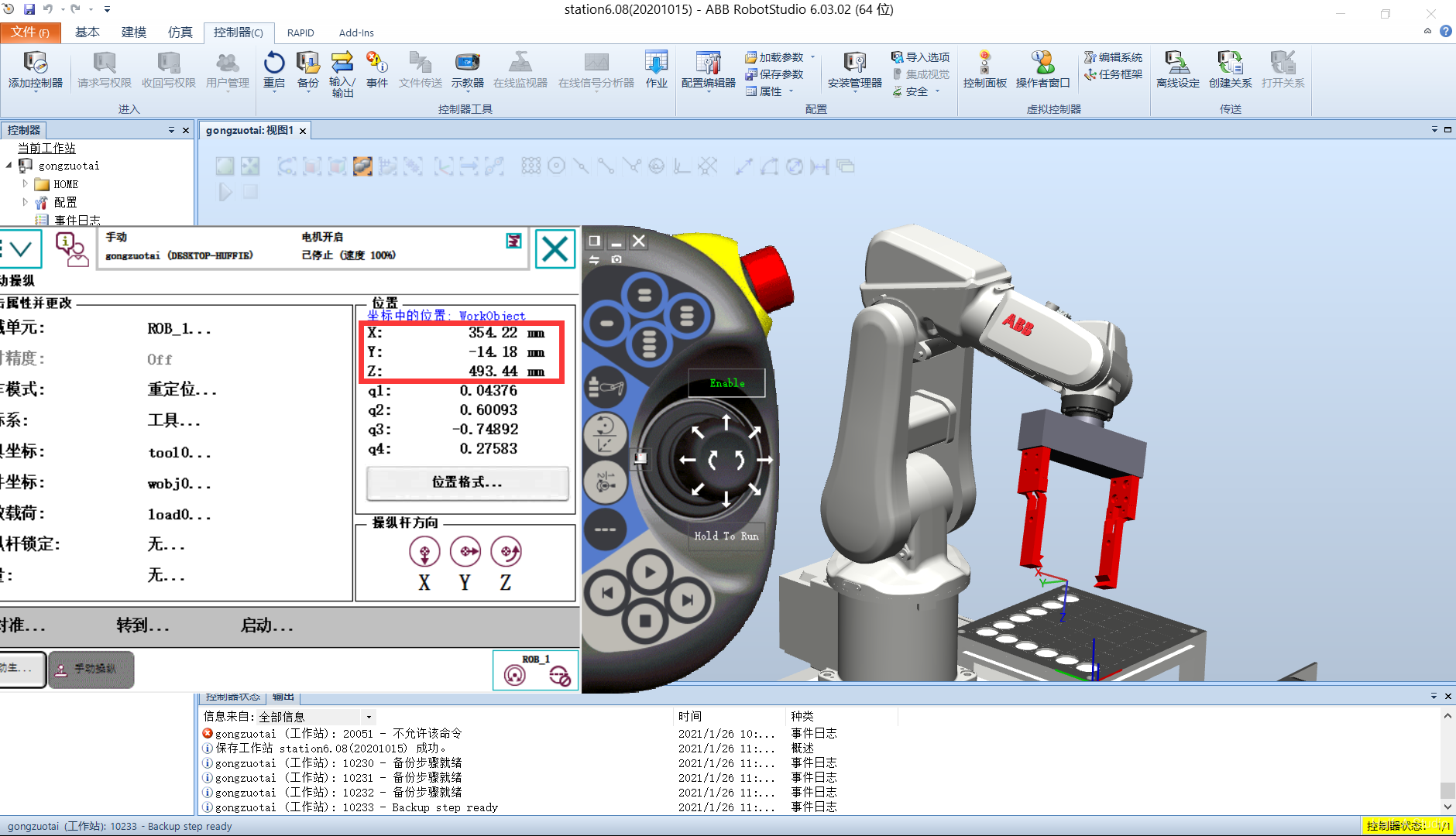
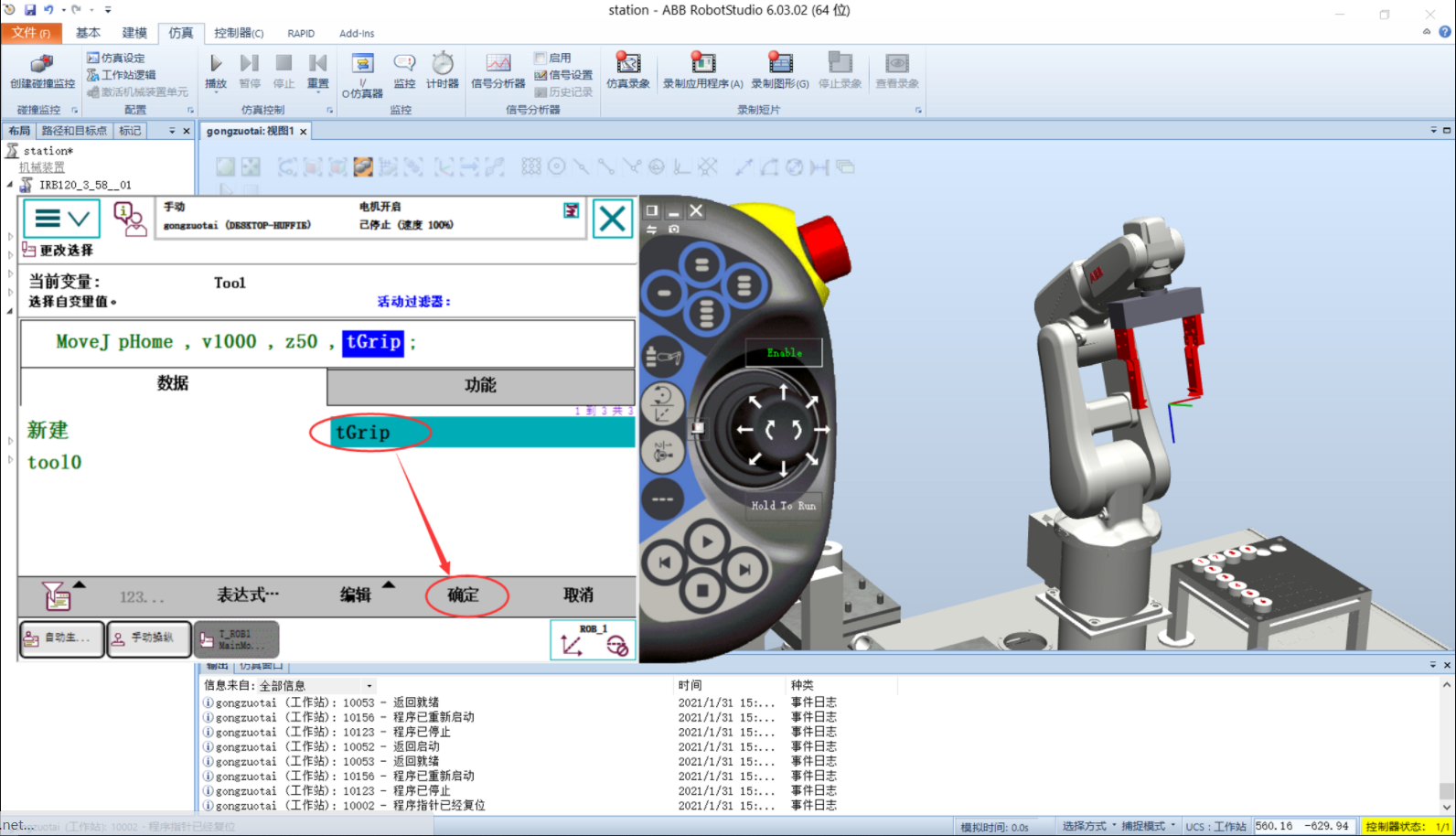
四、修改程序中的工具数据
为了输出负载等其它参数的正常与机器人的稳定运行,需要将指令后的工具坐标修改为正确的工具坐标。
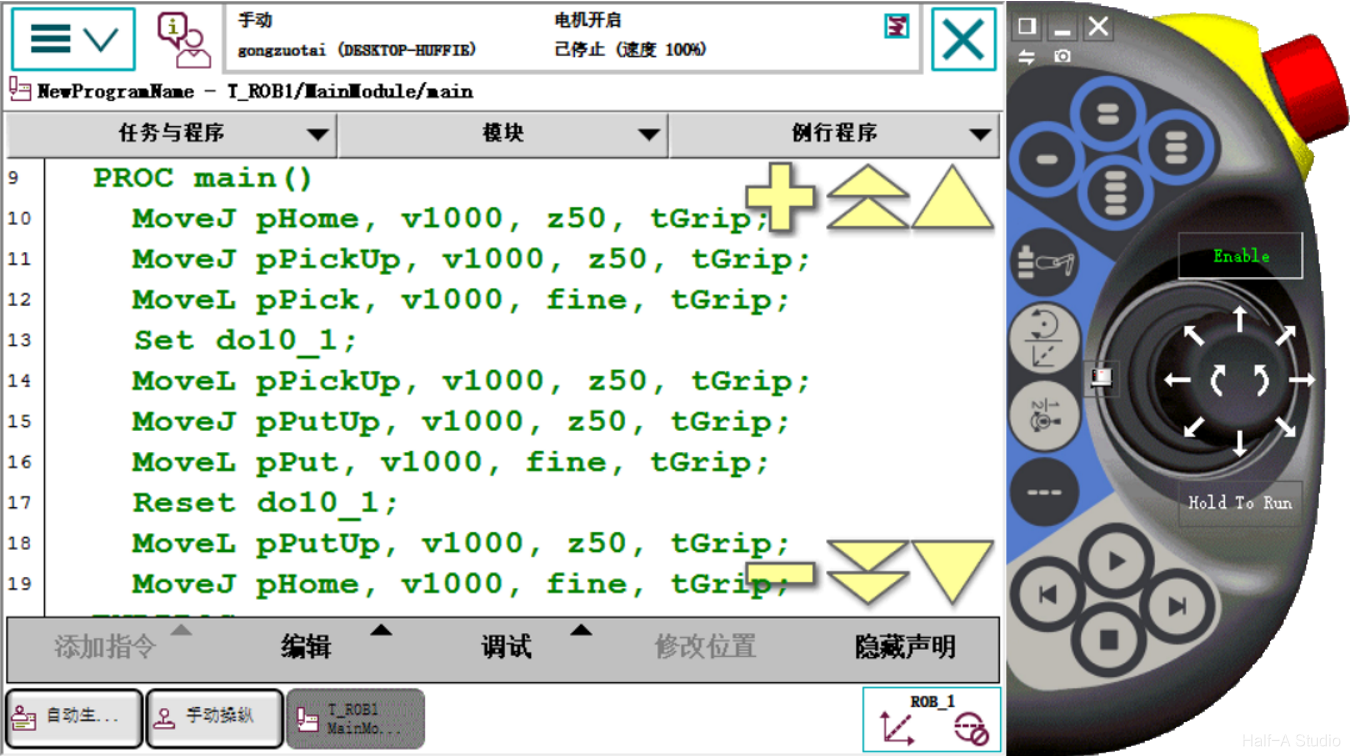
- 当机器人系统处于此行程序对应位置时,点击tool0修改为tGrip
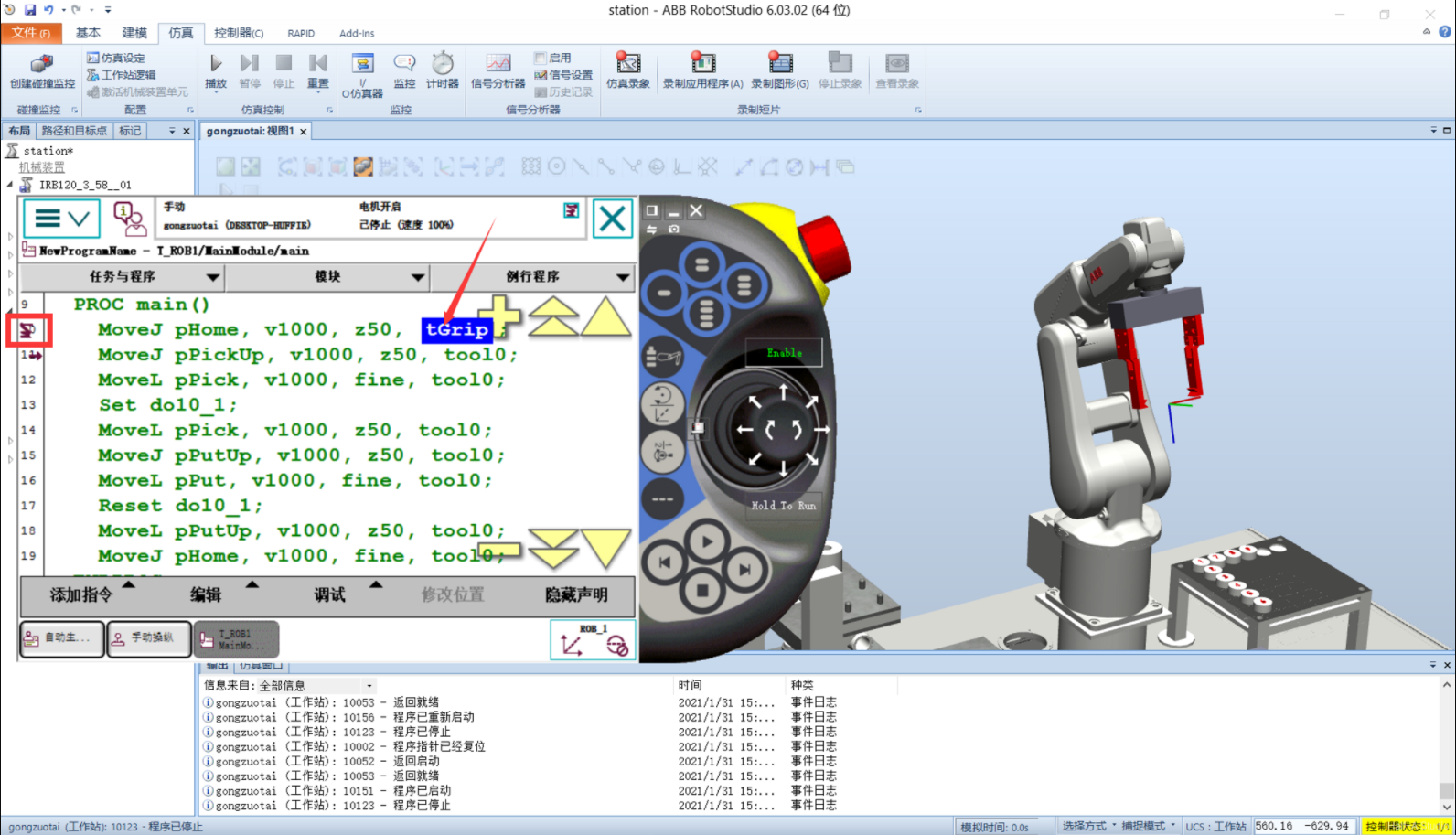
- 因工具坐标发生变化,所以对应的位置坐标也需要改变,点击修改位置即可将更改正确位置
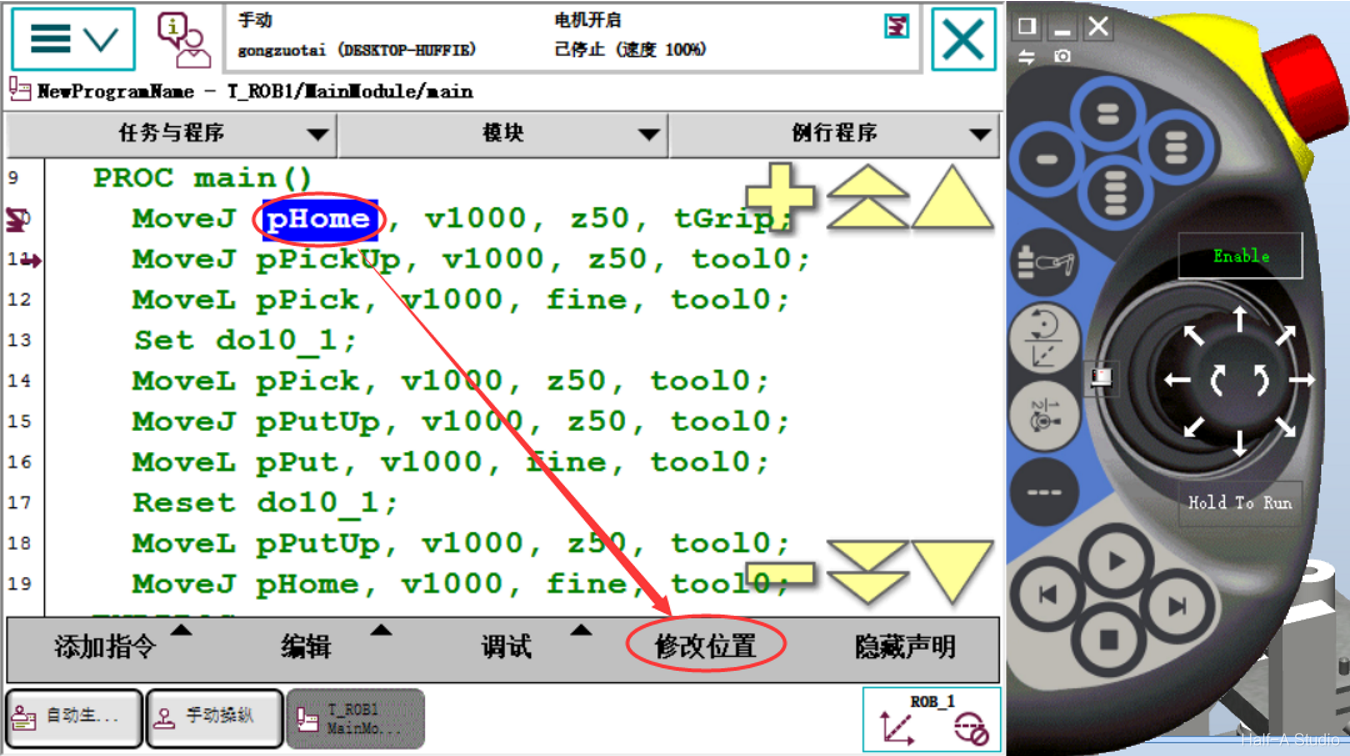
- 将机器人移动到下一个位置,然后再修改工具坐标,再更正位置。
 微信支付
微信支付 支付宝
支付宝
评论