【ROS学习笔记】(九)参数的使用与编程方法
一、参数模型
在ROS Master中有一个Parameter Server参数服务器,它是一个全局字典,用来保存各种配置参数,配置参数是各个节点都可以全局访问的。
二、使用方法
1. 列出当前所有参数
1 | rosparam list |
2. 显示某个参数值
1 | rosparam get param_key |
3. 设置某个参数值
1 | rosparam set param_key param_value |
4. 保存参数到文件
1 | rosparam dump file_name |
5. 从文件读取参数
1 | rosparam load file_name |
6. 删除参数
1 | rosparam delete param_key |
三、举例
1. 创建功能包
1 | cd ~/catkin_ws/src |
2. 打开小海龟仿真器
打开一个终端,启动roscore:
1 | roscore |
再打开一个终端,运行小海龟仿真程序
1 | rosrun turtlesim turtlesim_node |
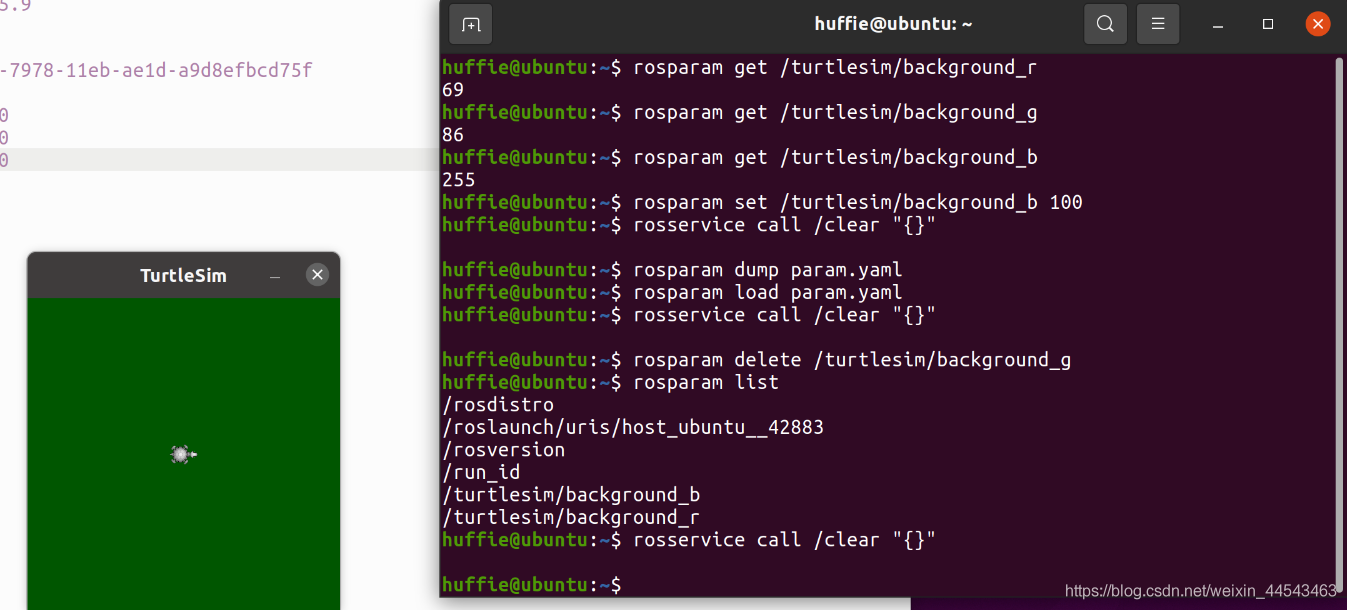
3. rosparam命令行的使用
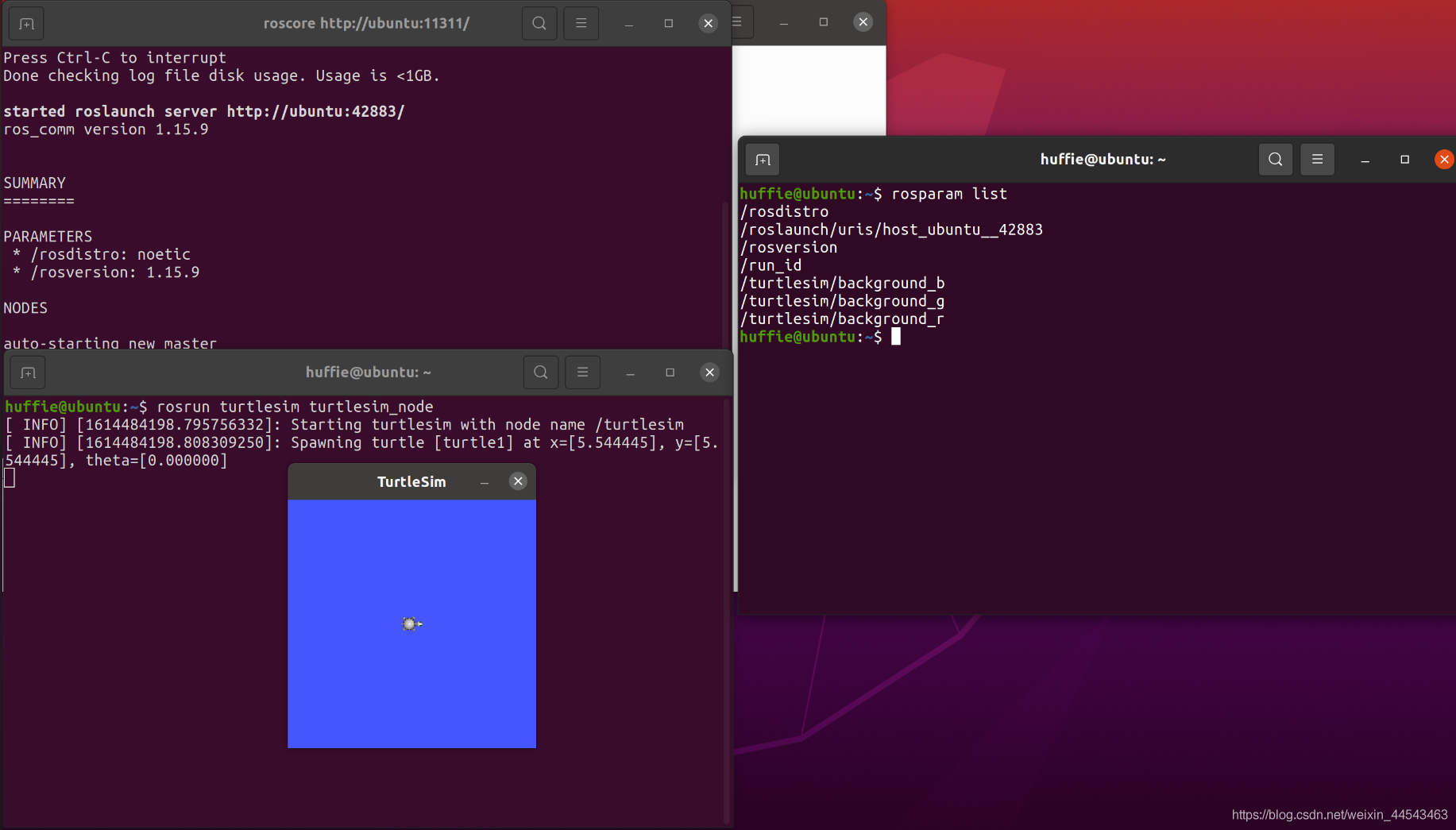
(1)查看参数列表
1 | rosparam list |
(2)得到变量的值:背景颜色RGB的值
1 | rosparam get /turtlesim/background_r |
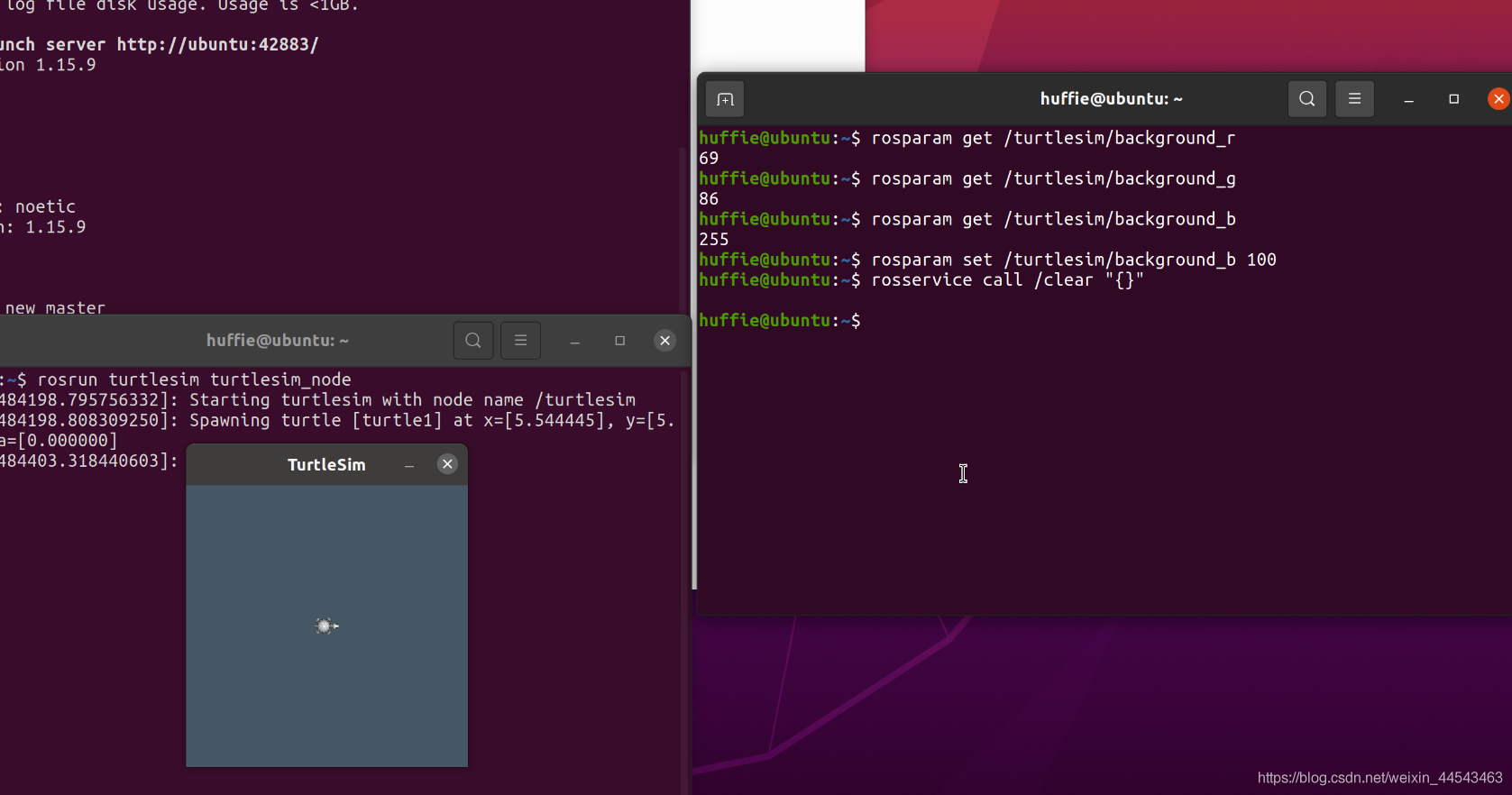
(3)修改变量的值:更改背景颜色
1 | rosparam set /turtlesim/background_b 100 |
重新发送请求,刷新背景颜色
1 | rosservice call /clear "{}" |
(4)保存参数到文件
1 | rosparam dump param.yaml |
参数默认保存到当前目录
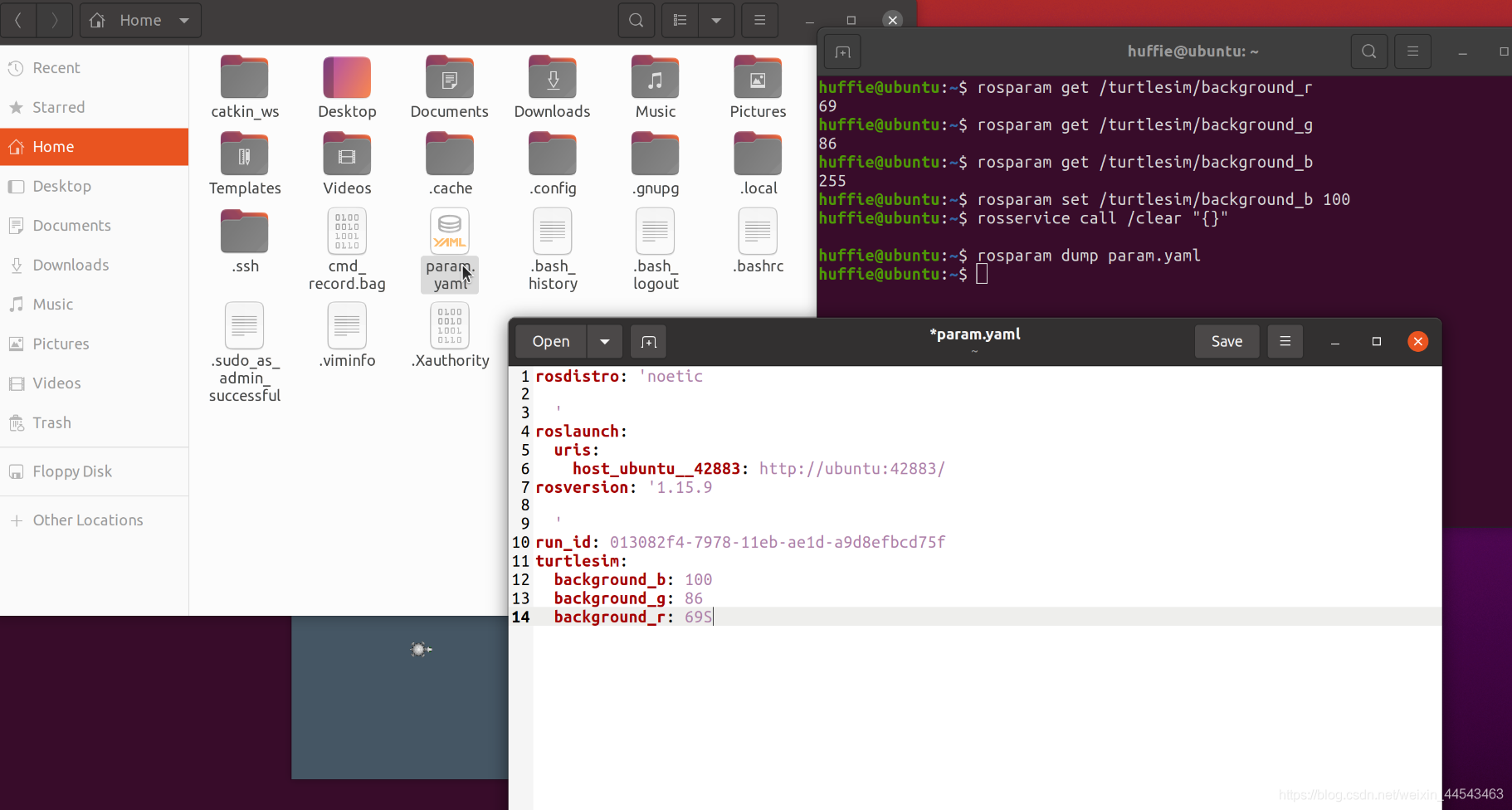
(5)加载参数文件
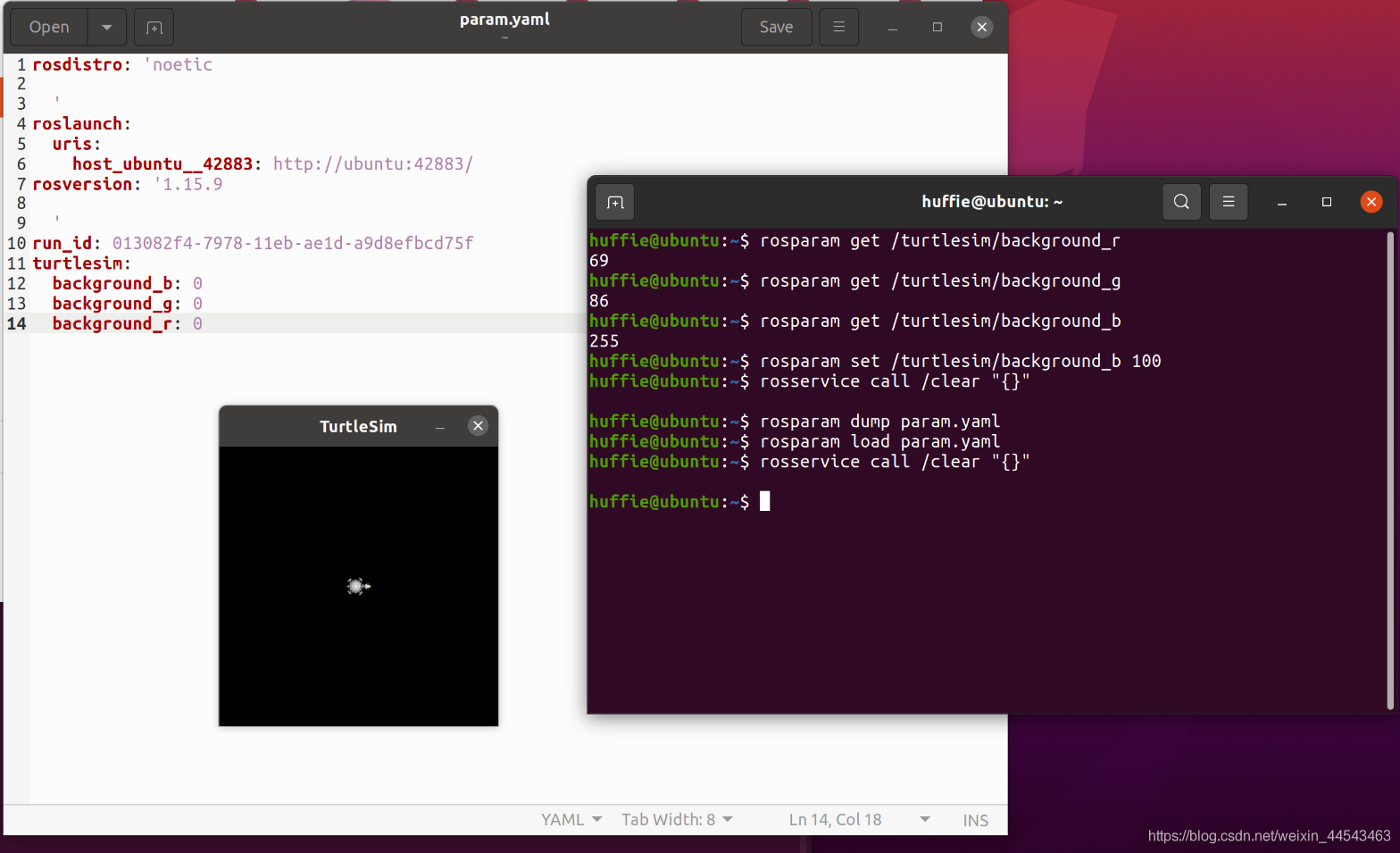
打开刚刚保存的参数文件,对其中的参数值进行修改。
1 | rosparam load param.yaml |
即可将文件里面的参数内容修改系统内的参数。
(6)删除参数
1 | rosparam delete /turtlesim/background_g |
查看参数列表
1 | rosparam list |
刷新小海龟仿真器背景颜色
1 | rosservice call /clear "{}" |
四、通过程序获取、设置参数的值
1. 编写cpp程序
在learning_parameter/src/目录下创建一个parameter_config.cpp的文件
其内容为:
1 | /** |

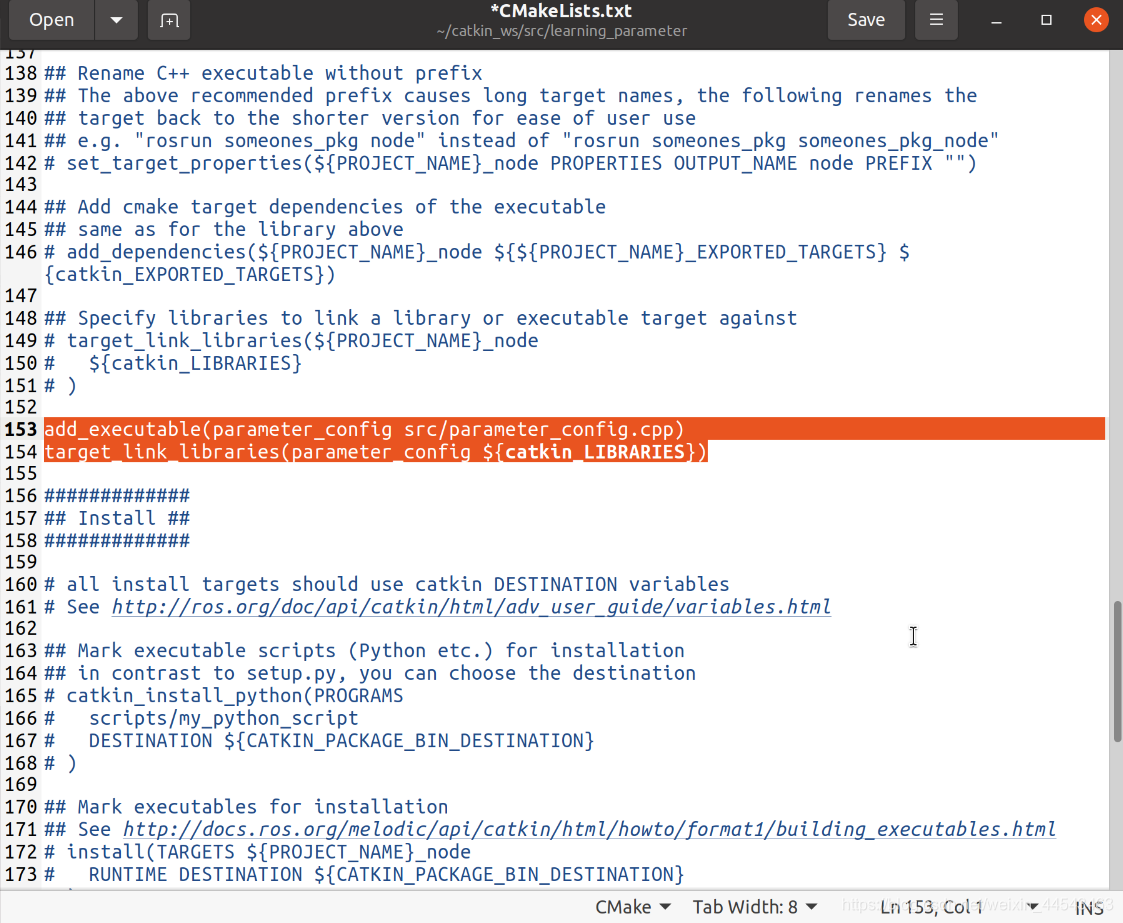
2. 编译程序
打开learning_parameter/下的CMakeList.txt文件,在其中添加编译规则。(install上方)
1 | add_executable(parameter_config src/parameter_config.cpp) |
进行编译
1 | cd catkin_ws |
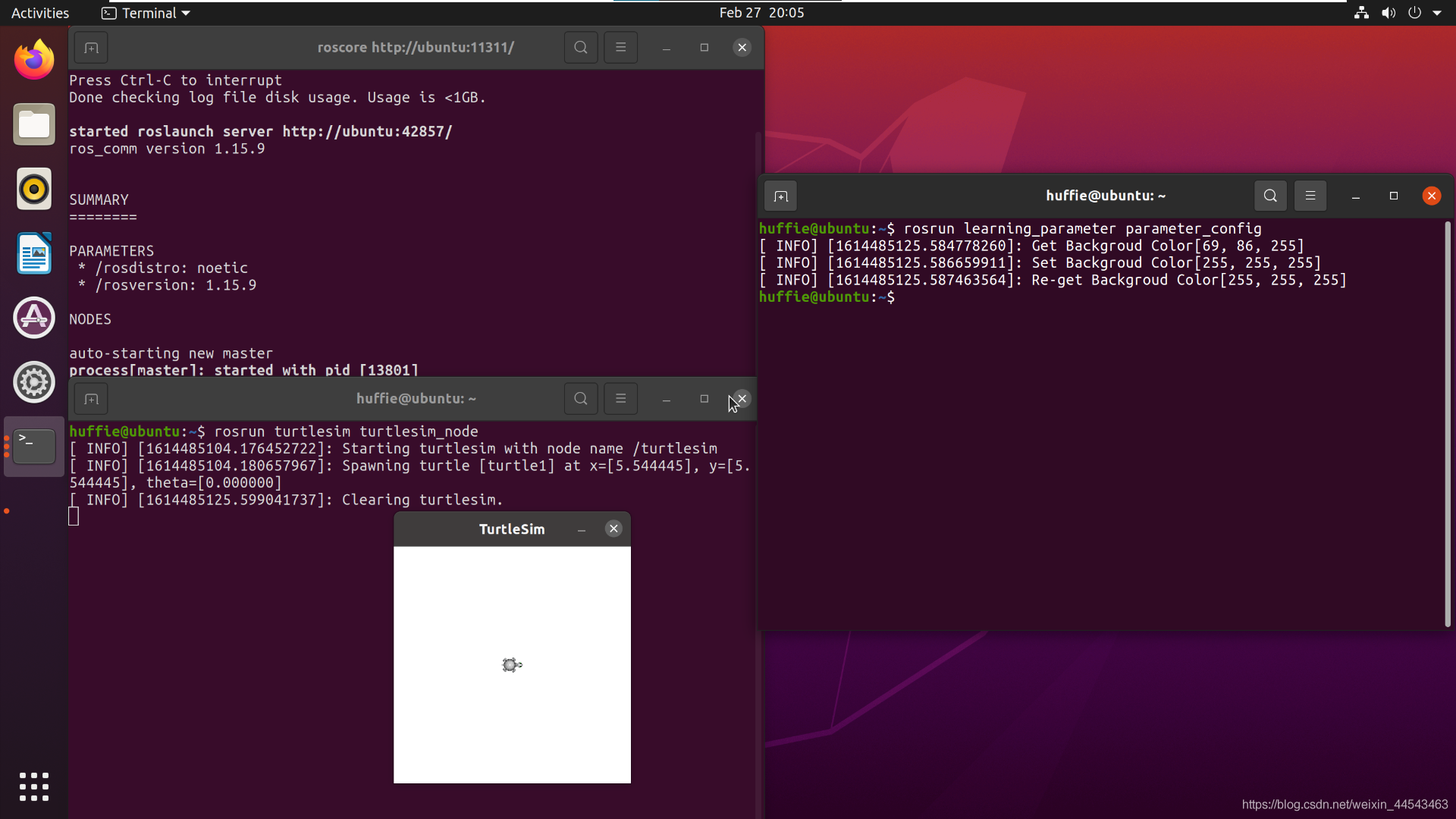
3. 运行程序
运行roscore
1 | roscore |
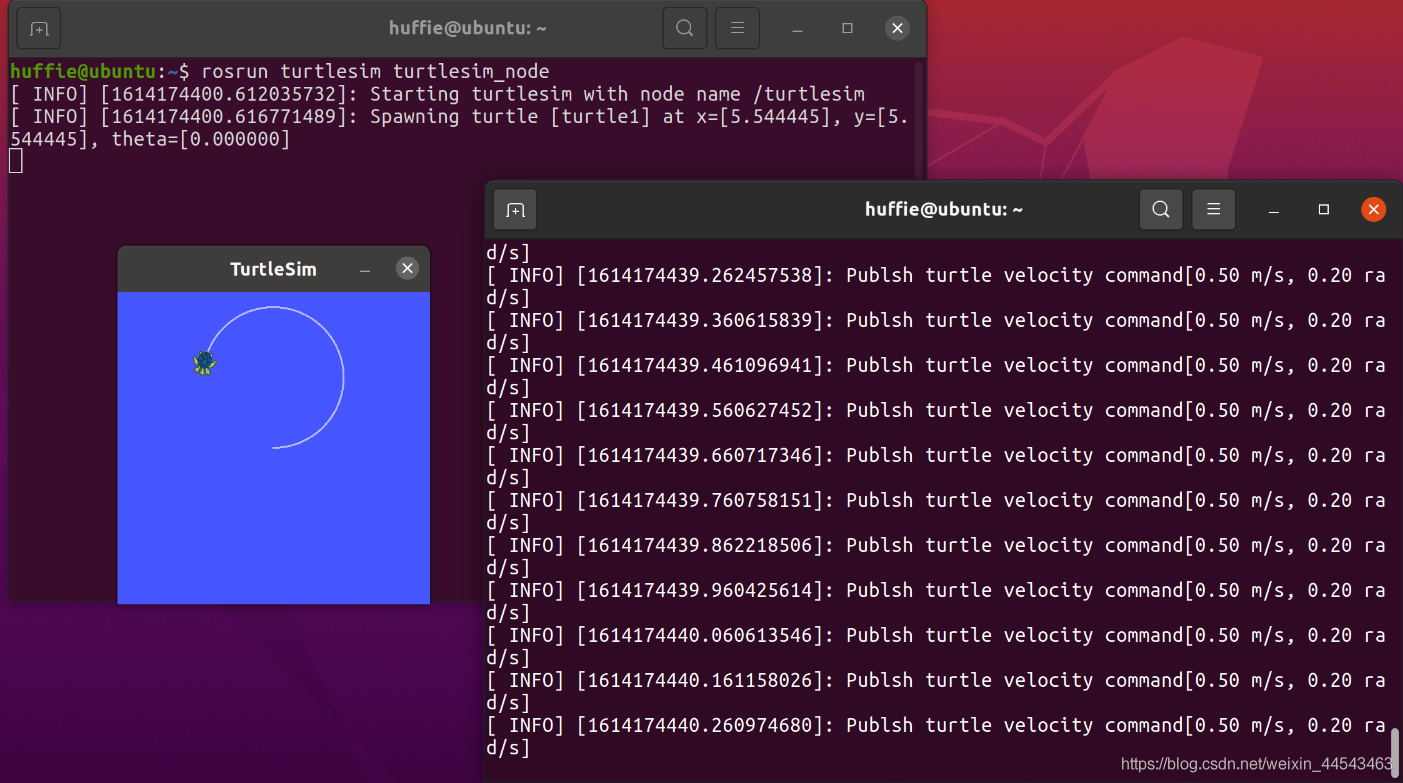
运行小海龟仿真程序
1 | rosrun turtlesim turtlesim_node |
运行刚才编写的节点
1 | rosrun learning_parameter parameter_config |
发现小海龟的颜色被改变了,说明程序执行成功
 微信支付
微信支付 支付宝
支付宝
评论