一、目标功能
订阅者订阅海龟的位姿信息。
二、创建功能包
首先创建工作空间,参考【ROS学习笔记】(二)工作空间与功能包的创建
然后创建一个功能包
1
2
| cd ~/catkin_ws/src
catkin_creat_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
|
三、创建订阅者代码
进入功能包的src文件夹下,创建一个cpp文件(也可以在图形界面直接创建)
1
2
3
| cd ~/catkin_ws/src/learning_topic/src
touch pose_subscriber.cpp
sudo gedit pose_subscriber.cpp
|
输入以下代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
| /***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
*/
// 接收到订阅的消息后,会进入消息回调函数
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "pose_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
|
代码思路:
- 初始化ROS节点
- 订阅需要的话题
- 循环等待话题消息,接收到消息后进入回调函数
- 在回调函数中完成消息处理

四、配置订阅者代码编译规则
-
设置需要编译的代码和生成的可执行文件
-
设置链接库
在Learning_topic/CMakeList.txt文件的Build下方(Install上方),添加代码如下
1
2
| add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})
|

五、编译并运行订阅者SubScriber
1. 编译
1
2
3
| cd ~/catkin_ws
catkin_make
source devel/setup.bash
|
可以在[.bash]文件最后添加source语句,这样就不用每次再在终端输入source命令
sudo vim ~/catkin_ws
source /home/huffie/catkin_ws/devel/setup.bash
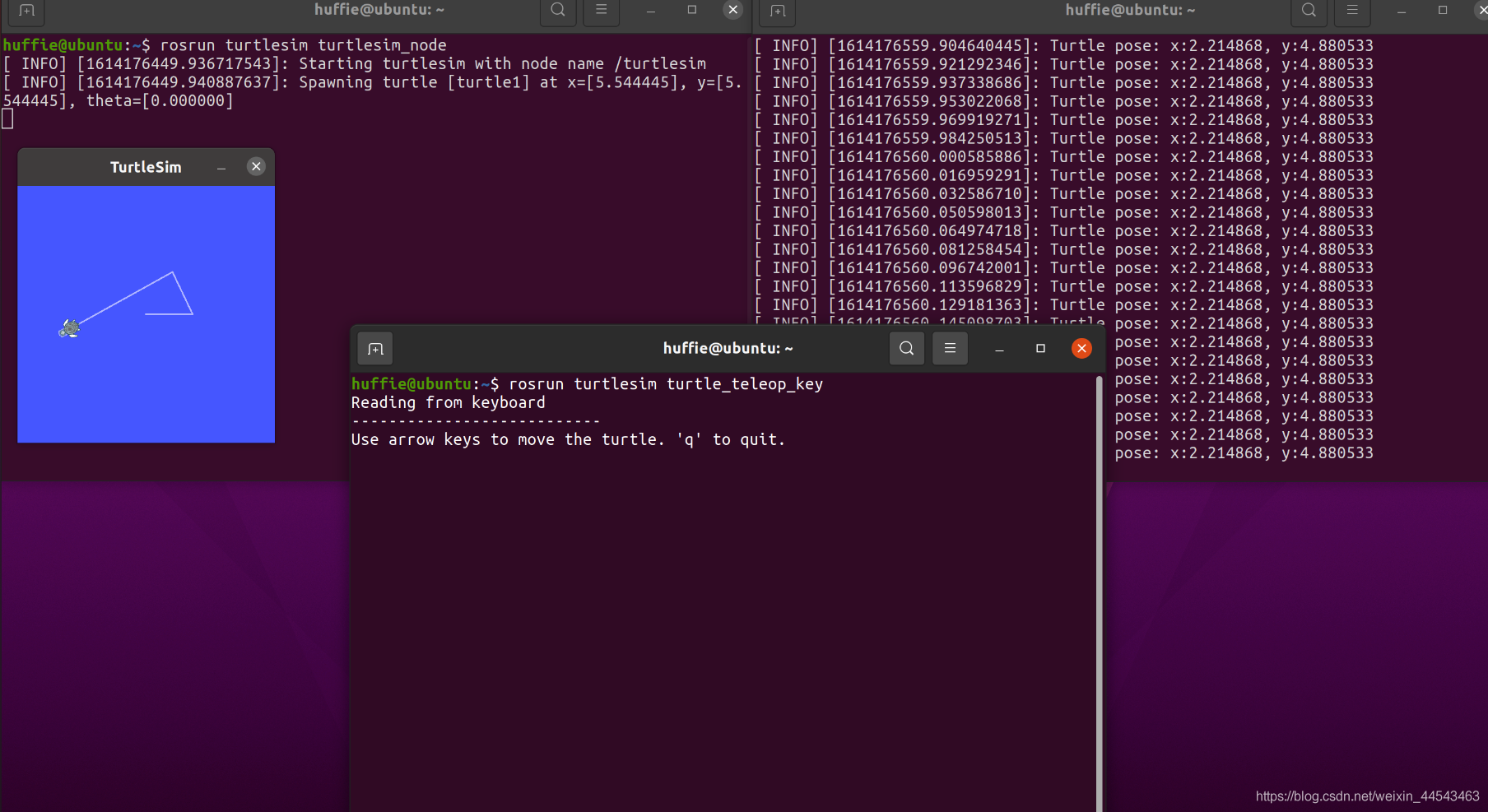
2. 运行
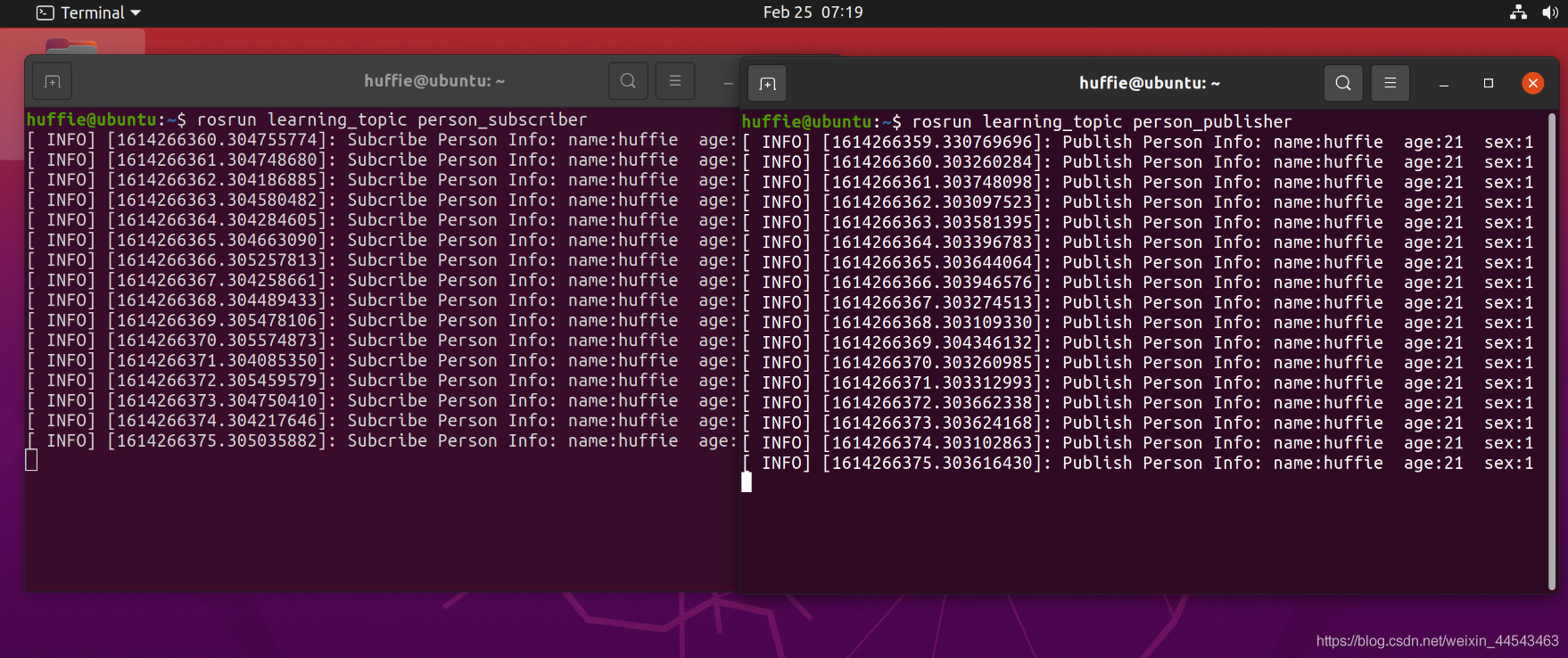
打开小海龟的仿真程序,运行subscriber,同时让小海龟动起来,可以看到姿态坐标在实时改变。
1
2
3
4
| roscore
rosrun turtlesim turtlesim_node
rosrun learning_topic pose_subscriber
rosrun turtlesim turtle_teleop_key
|
【ROS学习笔记】(四)订阅者Subscriber的实现
 微信支付
微信支付 支付宝
支付宝