Ubuntu20.04安装ROS Noetic
本文参考ros官网http://wiki.ros.org/的有关安装教程
一、准备工作
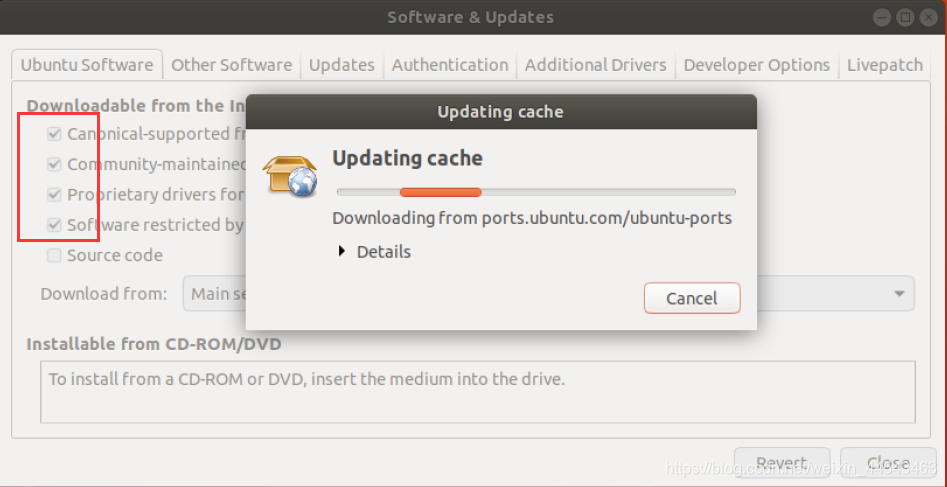
1. 添加ROS软件源
打开软件与更新,将下载选项前四个都选上。
一定要确保都勾选上,不然后续安装时会出现依赖关系问题
然后执行以下命令添加软件源
1 | sudo sh -c 'echo "deb https://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' |
2. 添加公钥
1 | sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 |
3. 更新索引
1 | sudo apt-get update |
二、安装ROS
1. 安装ROS
建议安装桌面完整版
1 | sudo apt install ros-noetic-desktop-full |
2. 设置环境变量
1 | echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc |
3. 初始化rosdep
在使用许多ROS工具之前,需要初始化rosdep。rosdep是运行ROS中某些核心组件所必需的,首先安装rosdep
1 | sudo apt install python3-rosdep |
然后进行初始化
1 | sudo rosdep init |
rosdep init如果出现【ERROR: cannot download default sources list from:…
Website may be down.】
rosdep update如果出现超时问题
解决方法:
1.sudo apt-get install python3-pip
2.sudo pip3 install rosdepc
3.sudo rosdepc init
4.rosdepc update
4. 安装其它工具和依赖包
1 | sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential |
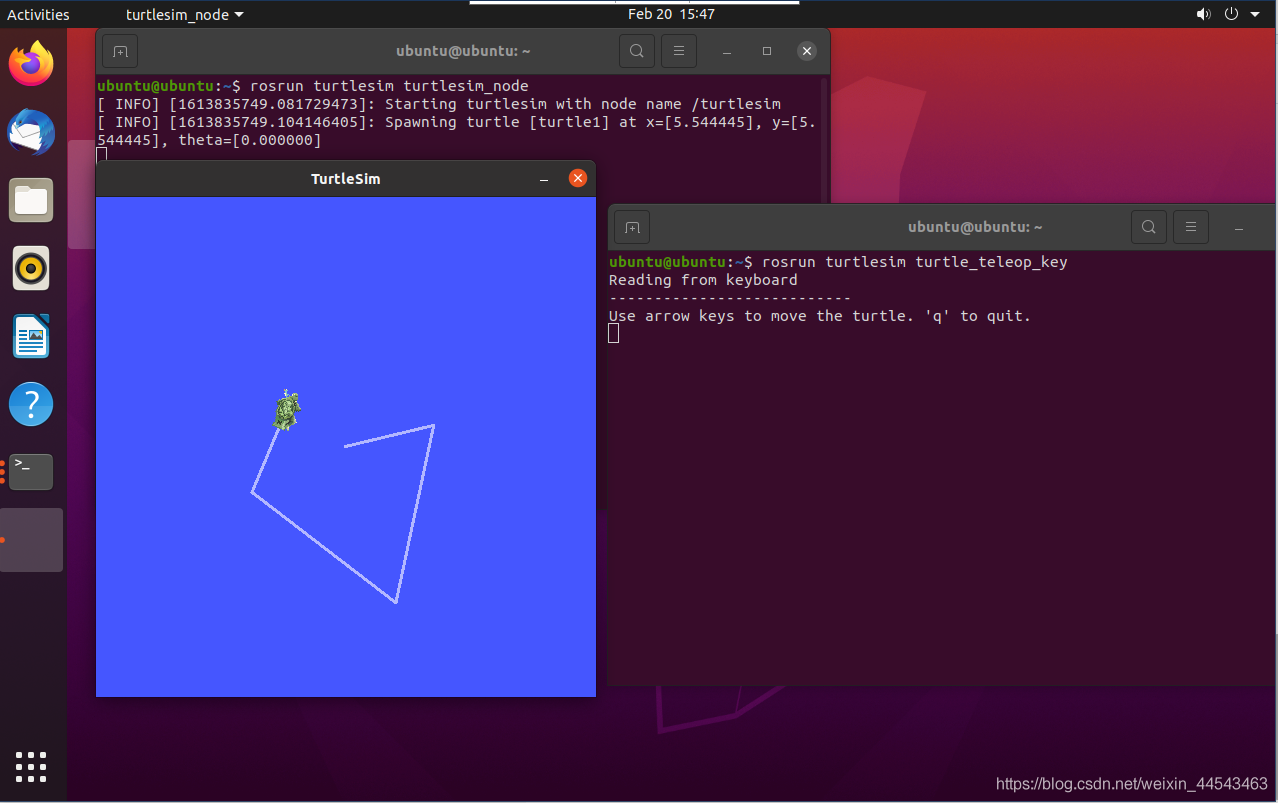
三、测试
打开终端,输入roscore,运行ros
再打开一个新终端,输入:rosrun turtlesim turtlesim_node,可以看到小乌龟的仿真界面已经打开了。再打开一个新终端输入指令:rosrun turtlesim turtle_teleop_key,可以在这个key终端内,通过键盘的方向键控制小乌龟在界面中移动
 微信支付
微信支付 支付宝
支付宝
评论