【论文笔记】DenseFusion被引论文丨无代码
01. 6D Pose Estimation for Bin-Picking based on Improved Mask R-CNN and DenseFusion
期刊 / 会议:26th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA)
作者 / 机构:Hesheng Wang, 上海交通大学
关键词:位姿估计, 实例分割, MaskRCNN, DenseFusion
时间:2021
代码:无
1 目标问题
将实例分割算法和位姿估计算法应用到工业机器人抓取中。
2 方法
使用两级神经网络,将输入的RGB-D图像回归出6D位姿。
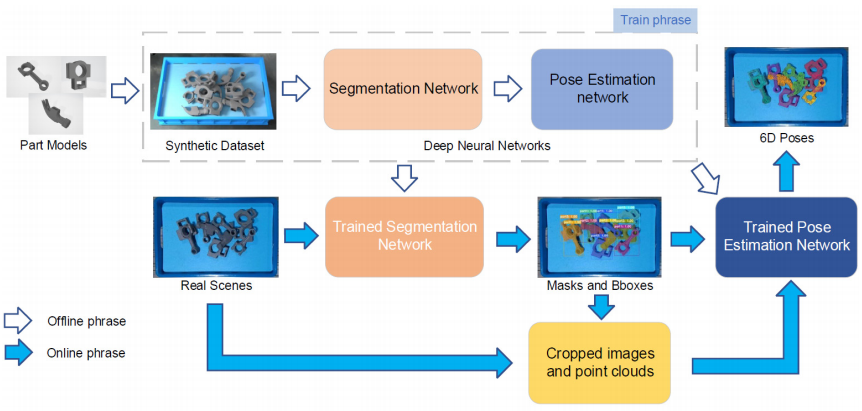
(1)数据集生成
由于基于学习的算法需要大量的已经标注的数据集,因此本文给出了一种工业零件的虚拟数据集的生成过程。使用Blender进行物理模拟,调整渲染参数,生成多种高质量的RGB图像及分割掩码和6D姿态标签。
(2)实例分割
使用ResNeXt与MaskRCNN完成目标检测与实例分割。
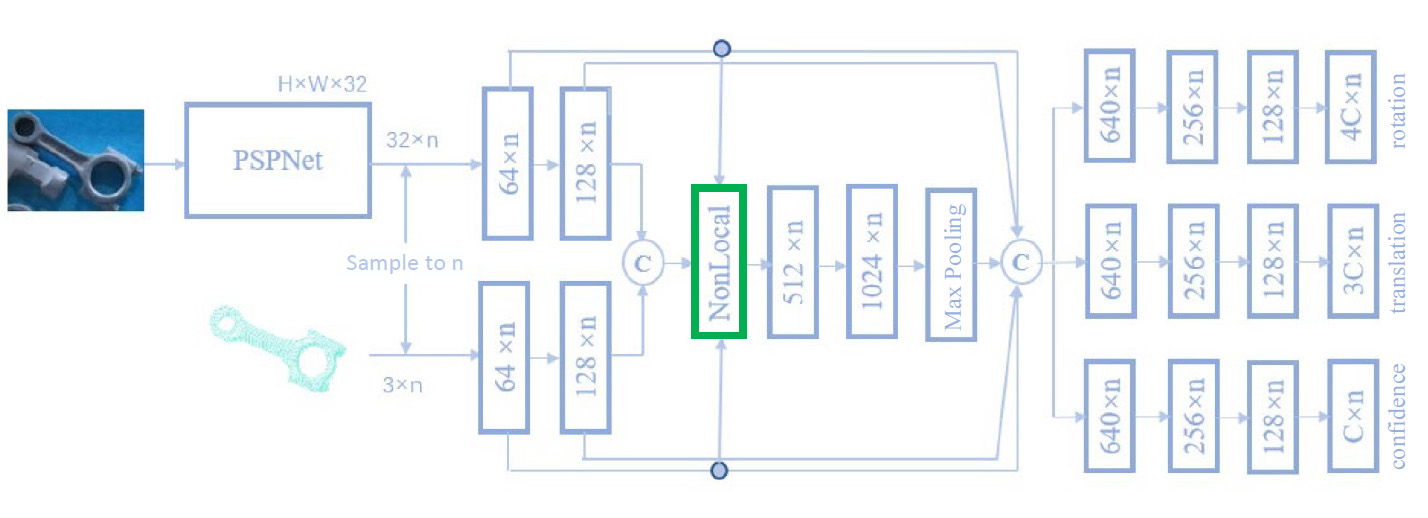
(3)姿态估计
基于DenseFusion来预测6D位姿,为了提高性能,增加了NonLocal模块,(图中的绿色块),使得网络可以从提取的特征中学习空间结构特征,并且可以有效地在点特征之间建立连接。(好像没什么用)
3 思考
虚拟数据集可辅助提高训练结果的鲁棒性,可尝试。
02. A Lightweight Two-End Feature Fusion Network for Object 6D Pose Estimation
期刊 / 会议:Machines
作者 / 机构:Ligang Zuo, 北京科技大学
关键词:位姿估计, 特征融合
时间:2022
代码:无代码
1 目标问题
提出一种轻量化的位姿估计模型,用于部署在移动设备上。
2 方法
- 使用PointnoProblemNet网络提取点云特征
- 将点云特征与图像特征进行像素级融合
- 利用CNN进行特征提取
- 对每个特征进行位姿估计,选择置信度最高的作为最终结果
(这不就是DenseFusion的思路吗,只不过把PointNet换成了PointnoProblem)
使用深度可分离卷积代替标准卷积,即将ResNet特征提取部分换为MobileNetv2,来减少模型参数的数量。
3 思考
可以考虑尝试使用MobileNetv2特征提取网络,因为所使用的也是移动设备。
 微信支付
微信支付 支付宝
支付宝
评论