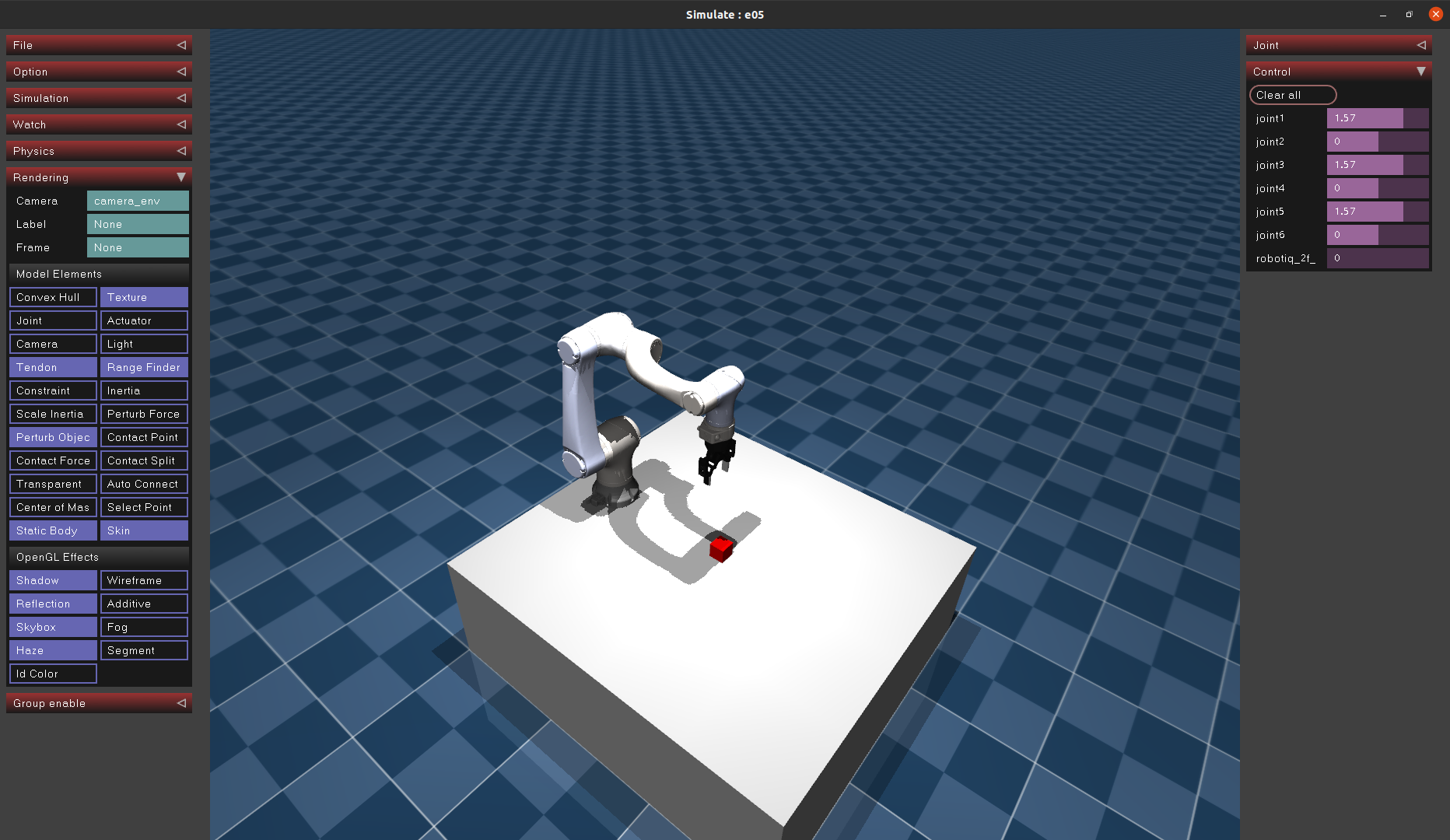
【实验准备】MuJoCo导入自定义机器人
将自定义机器人模型导入进Mujoco中,为后续强化学习搭建仿真环境基础。
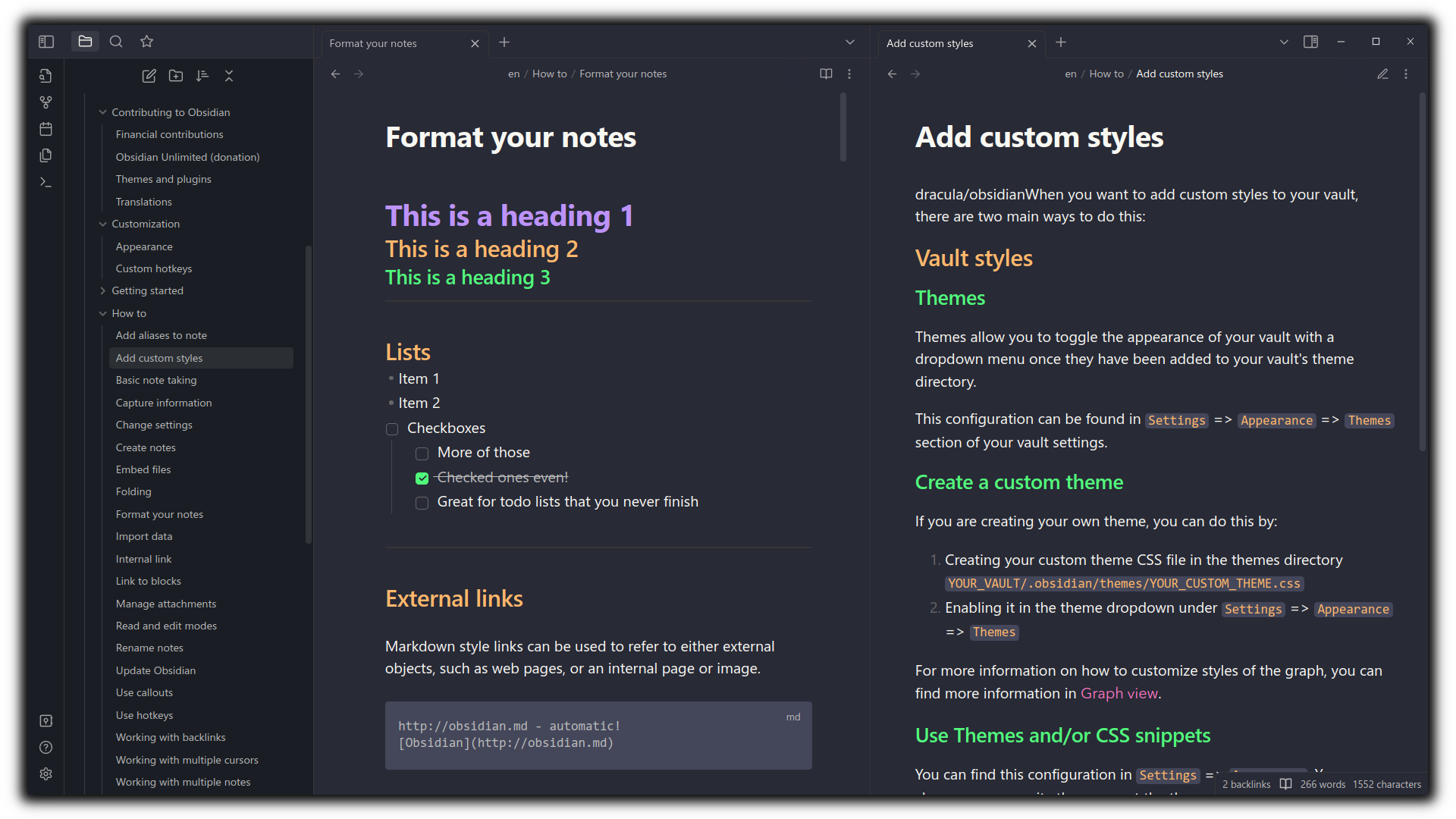
【笔记工具】Markdown语法与Obsidian编辑器
介绍一种我自己一直在用的非常强大的笔记语法Markdown,以及基于markdown语法的编辑器Obsidian.
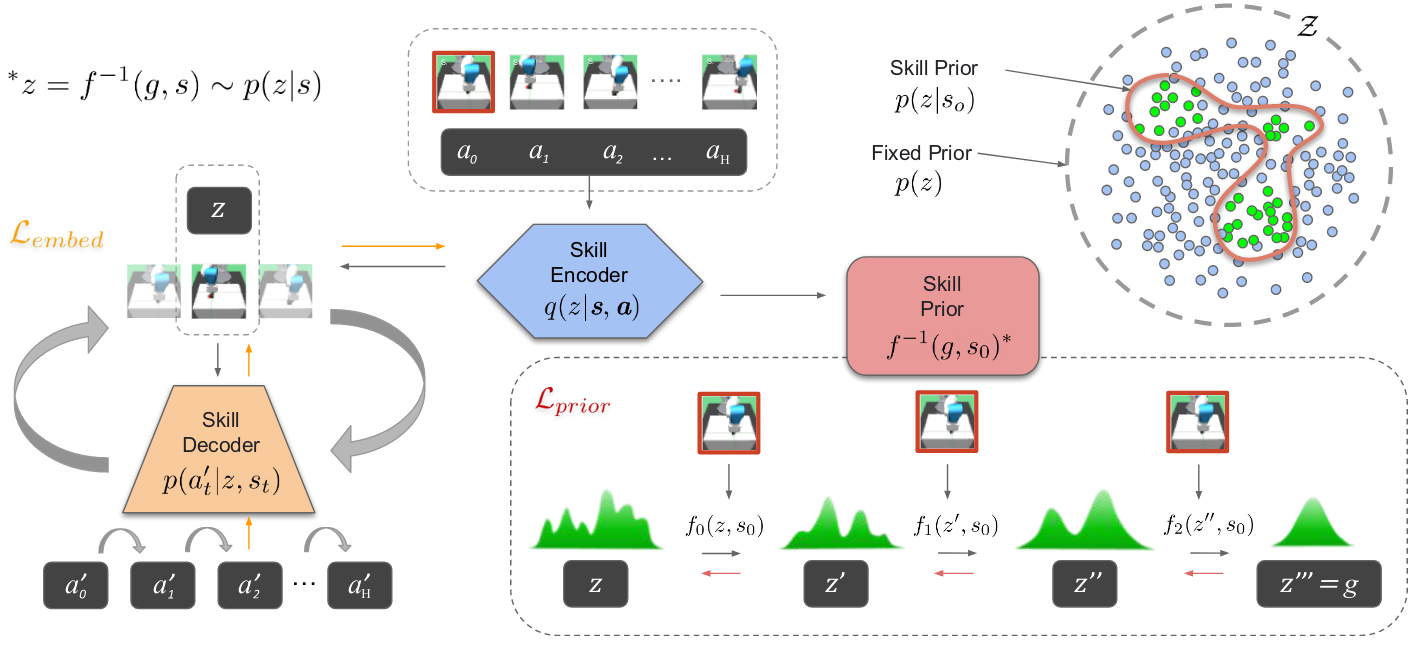
【论文笔记】Reskill基于技能的适应性动作空间学习
基于技能单元的强化学习方法,将任务分解为技能,建立技能与状态的映射关系,学习技能选择策略
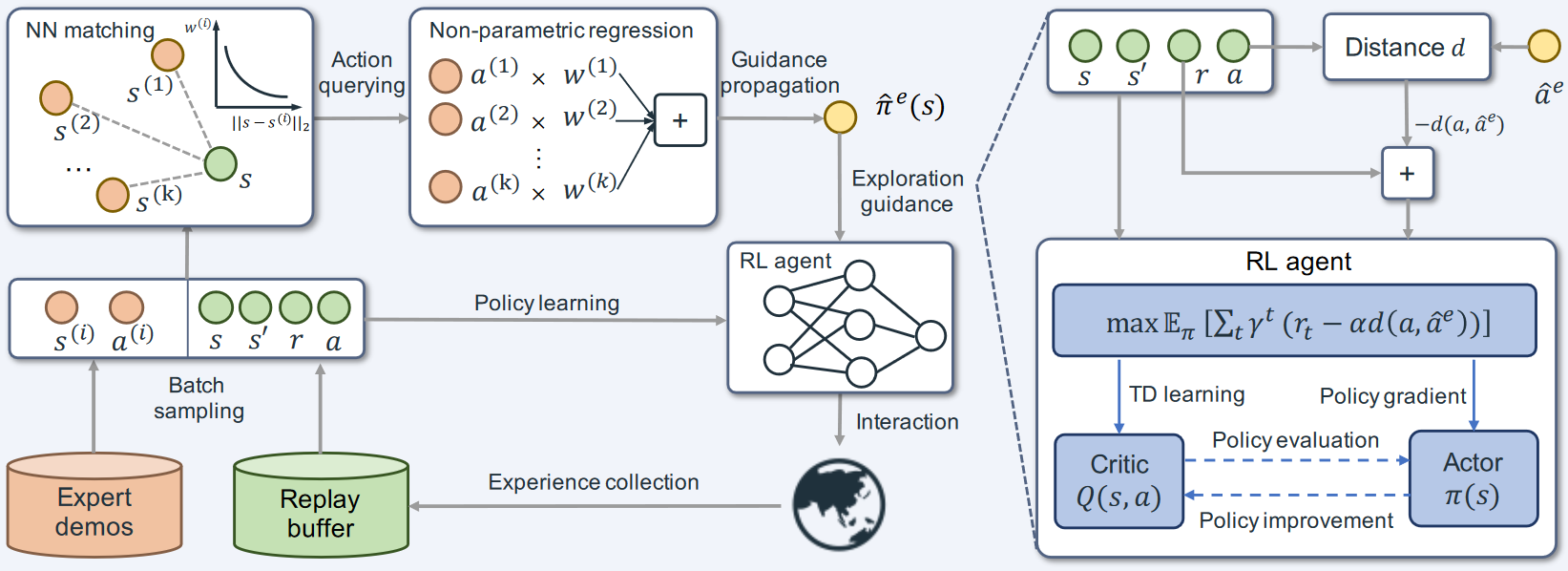
【论文笔记】Dex 演示引导强化学习与手术机器人任务自动化的高效探索
香港中文大学刘云辉团队基于DDPG+BC改进的手术机器人强化学习方法
强化学习与模仿学习Buglist(不定时更新)
强化学习环境搭建,项目运行过程中可能遇到的bug与解决方法记录
【论文笔记】基于强化学习的机器人动作模仿
基于强化学习的机器人动作模仿方法论文调研与笔记。