
ROS实现多机话题通信
两台Ubuntu系统(如台式机与机器人),通过网线连接,共享ROS节点。

Cloudflare R2 个人图床
之前使用阿里云OSS 搭建个人图床,但是随着文章数量和图片数量增多,网站访问量增大,图床的流量也变大了,导致费用日益上升。因此考虑切换一个图床平台,找到了赛博大善人 Cloudflare 的 R2 存储桶可以提供免费 10G 存储,每月 1000 万次免费读取请求。
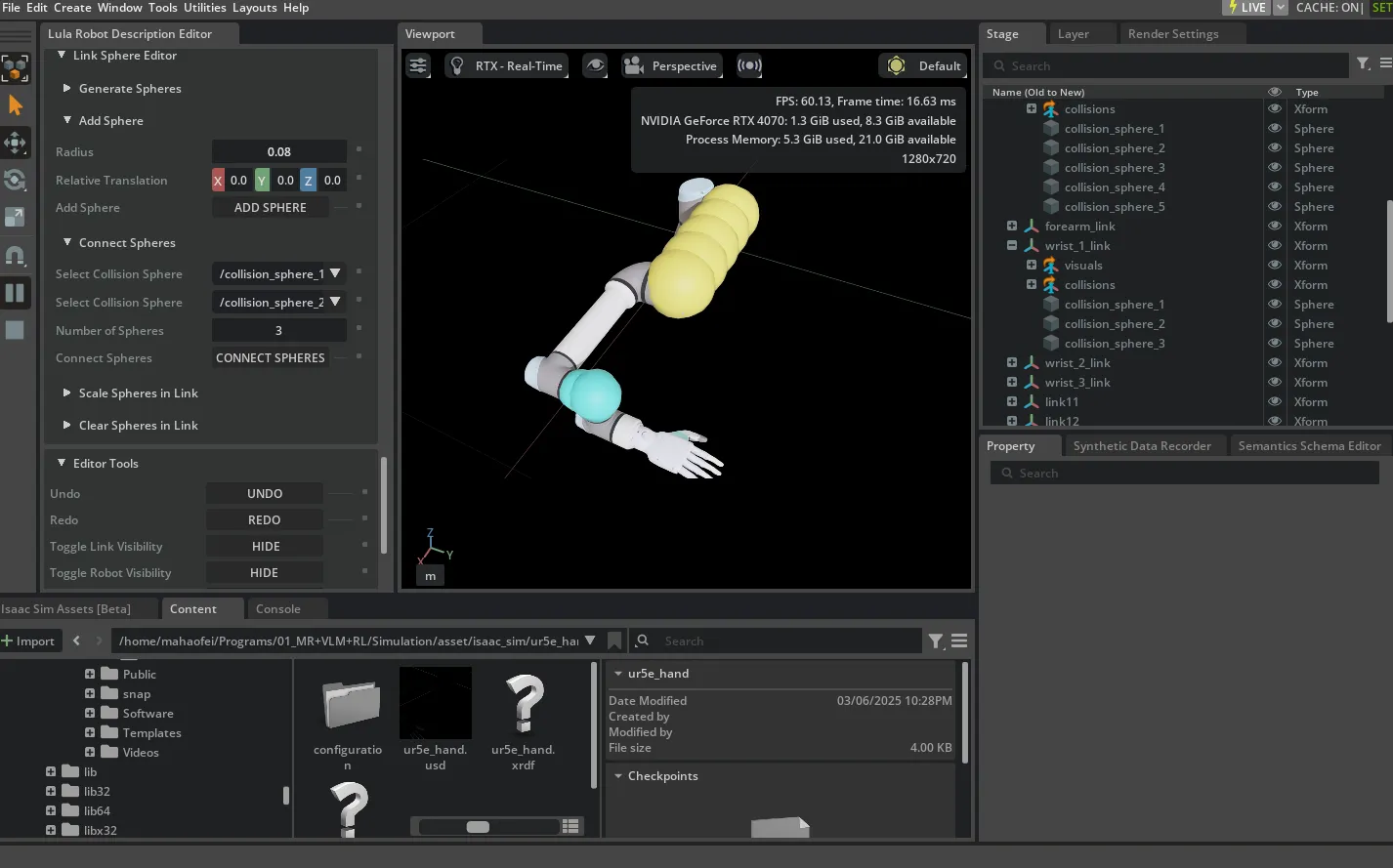
Isaac Sim 机械臂逆运动学控制
实现IsaacSim中实现笛卡尔空间控制(逆运动学)的方法。
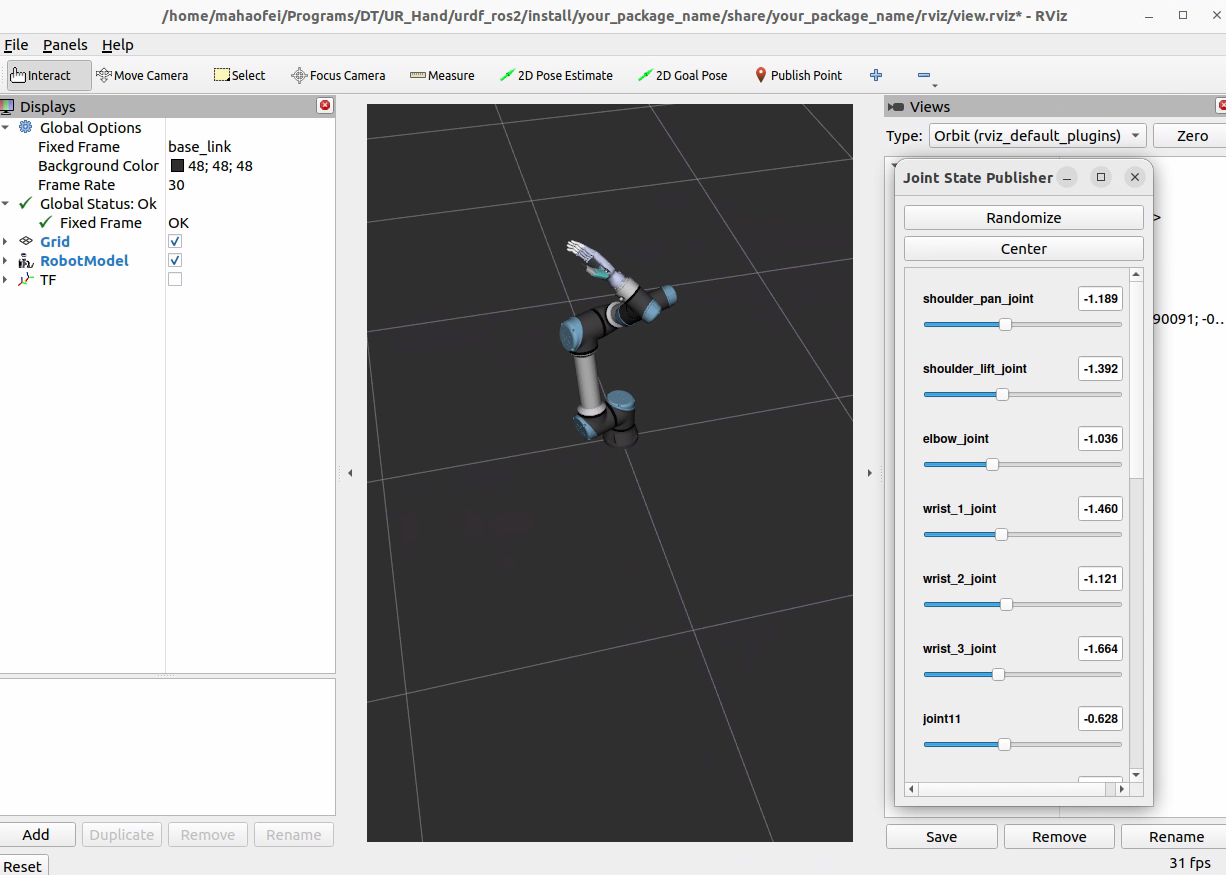
ROS2_Rviz2显示URDF模型
使用ROS2+Rviz2可视化URDF文件,一个示例功能包以及完整修改教程。

ROS2基本命令总结
最近在新的电脑上安装了Ubuntu22.04与ROS2 Humble,与时俱进,学习一下新的ROS2命令并总结下来,以便随时查看。

使用zsh创建更高效的shell环境
Zsh 完全兼容 bash,支持各种智能命令补全功能,支持大量的界面主题和插件,效率和美观都极大的增强。

Isaac Sim 仿真环境使用简介
NVIDIA Isaac Sim仿真环境的简介、安装、GUI和Python程序的基本使用介绍。

Ubuntu设置定时任务
由于某些需求(例如定时重启某个任务,定时推送更新博客,定时备份文件等),需要定时执行某些任务。

Ubuntu 固定USB设备端口名(ttyUSB0->自定义)
Ubuntu 系统下为 USB 转串口设备分配稳定且自定义的设备名(如 /dev/gripper)