RobotStudio双传送带系统的搭建
机械结构的搭建
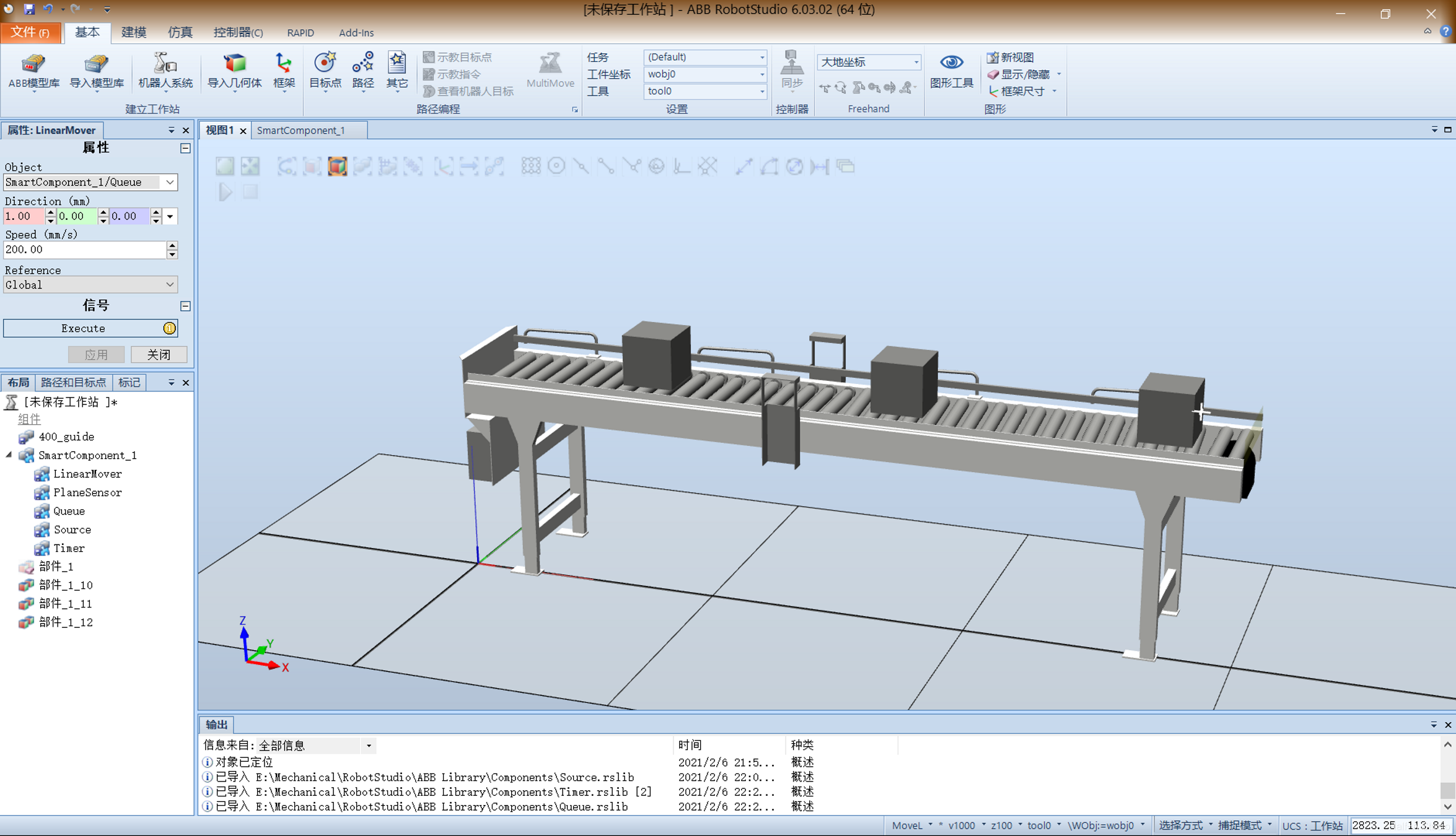
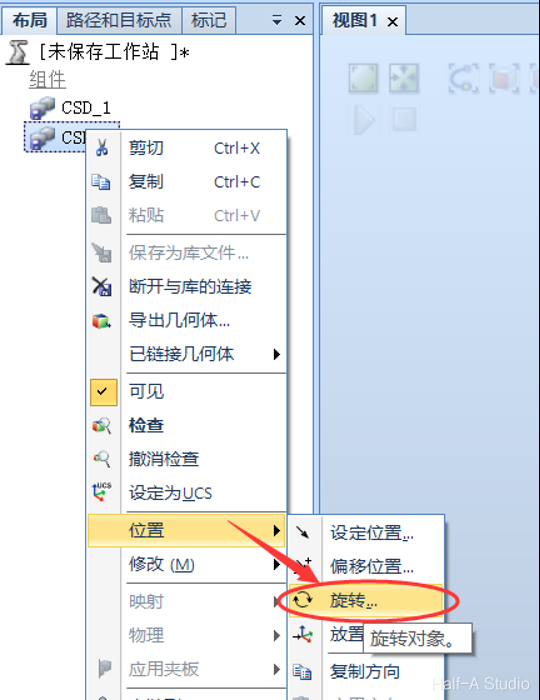
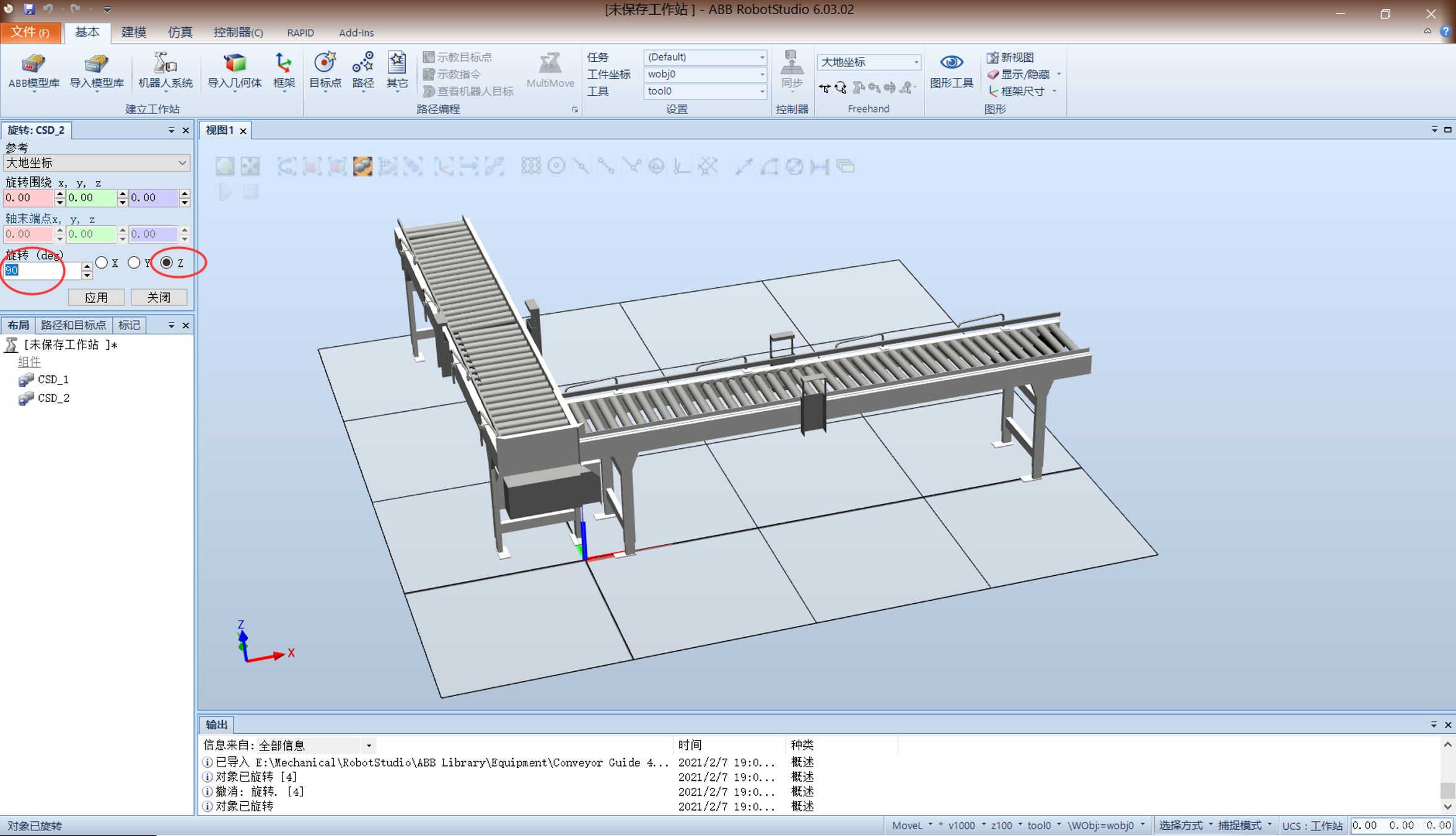
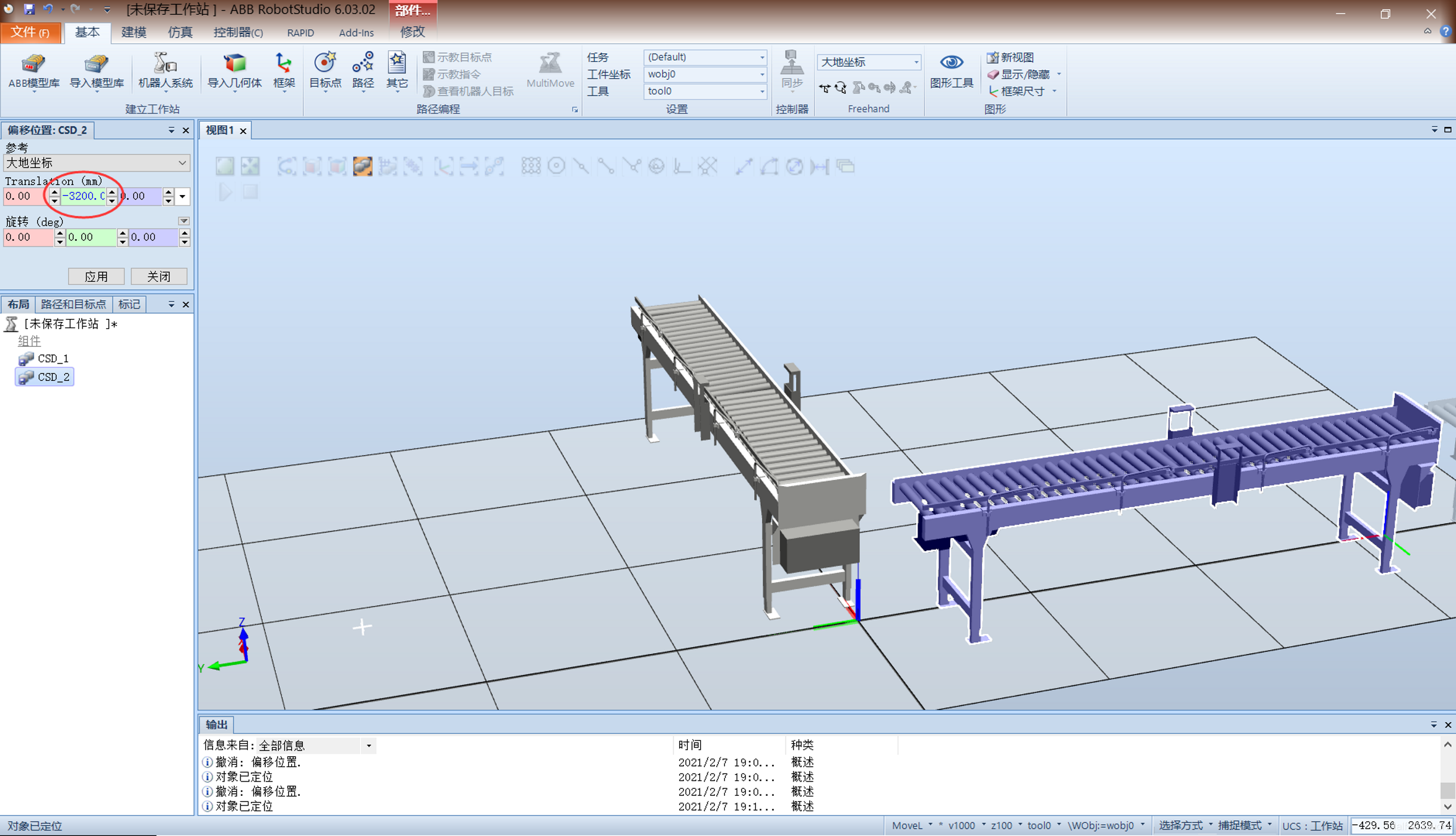
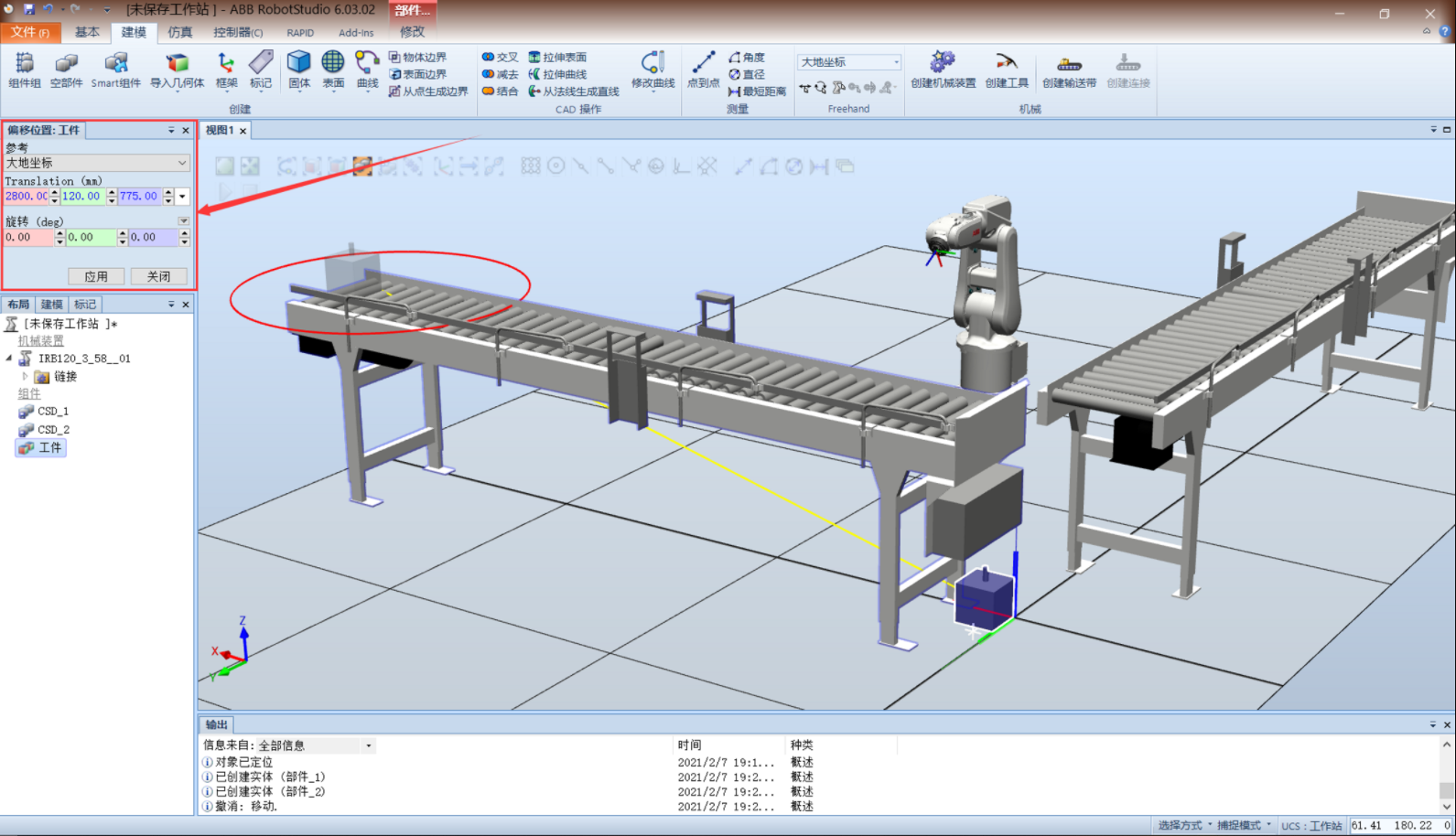
- 导入两个传送带,将第二个传送带以z轴旋转90°,再沿y轴偏移-3200mm。


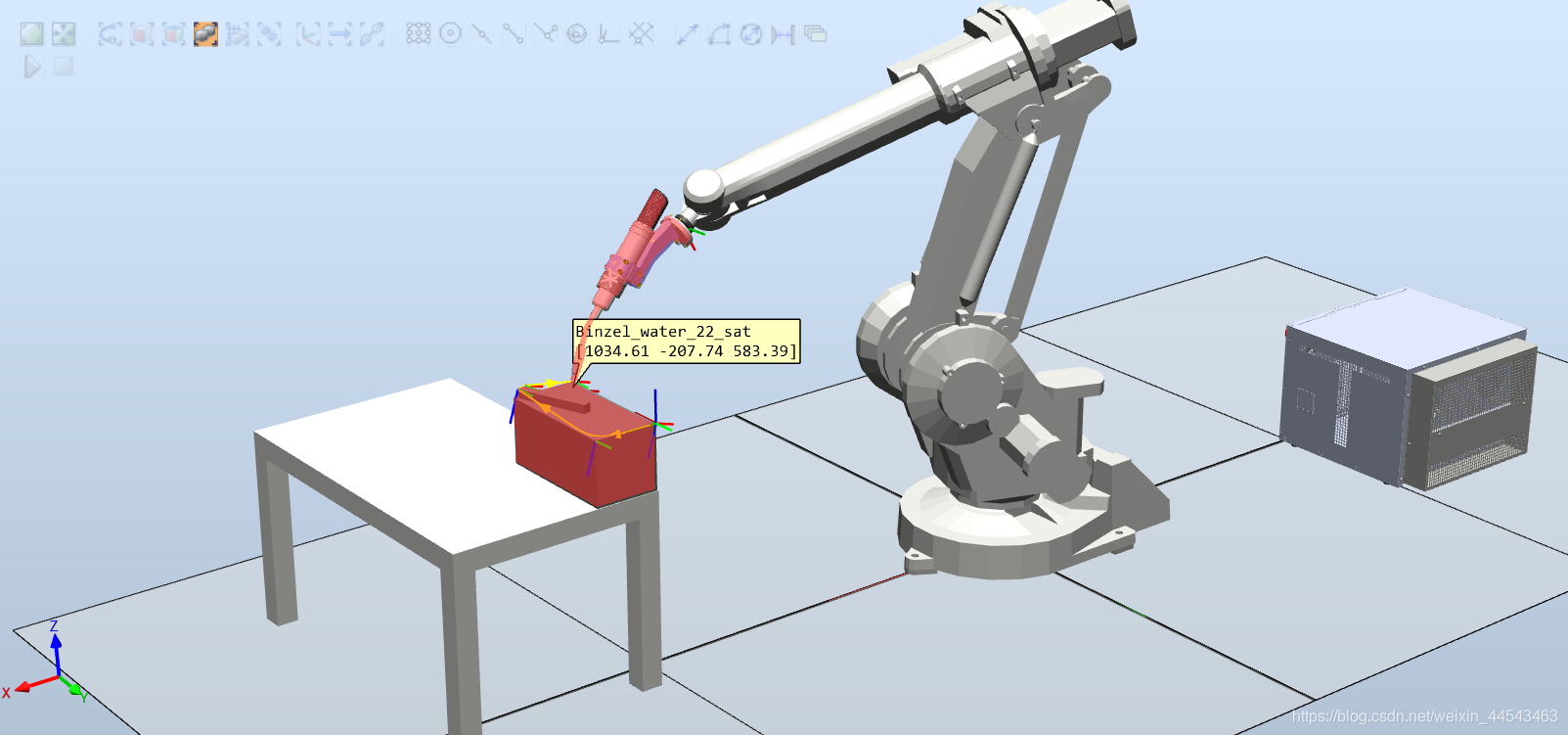
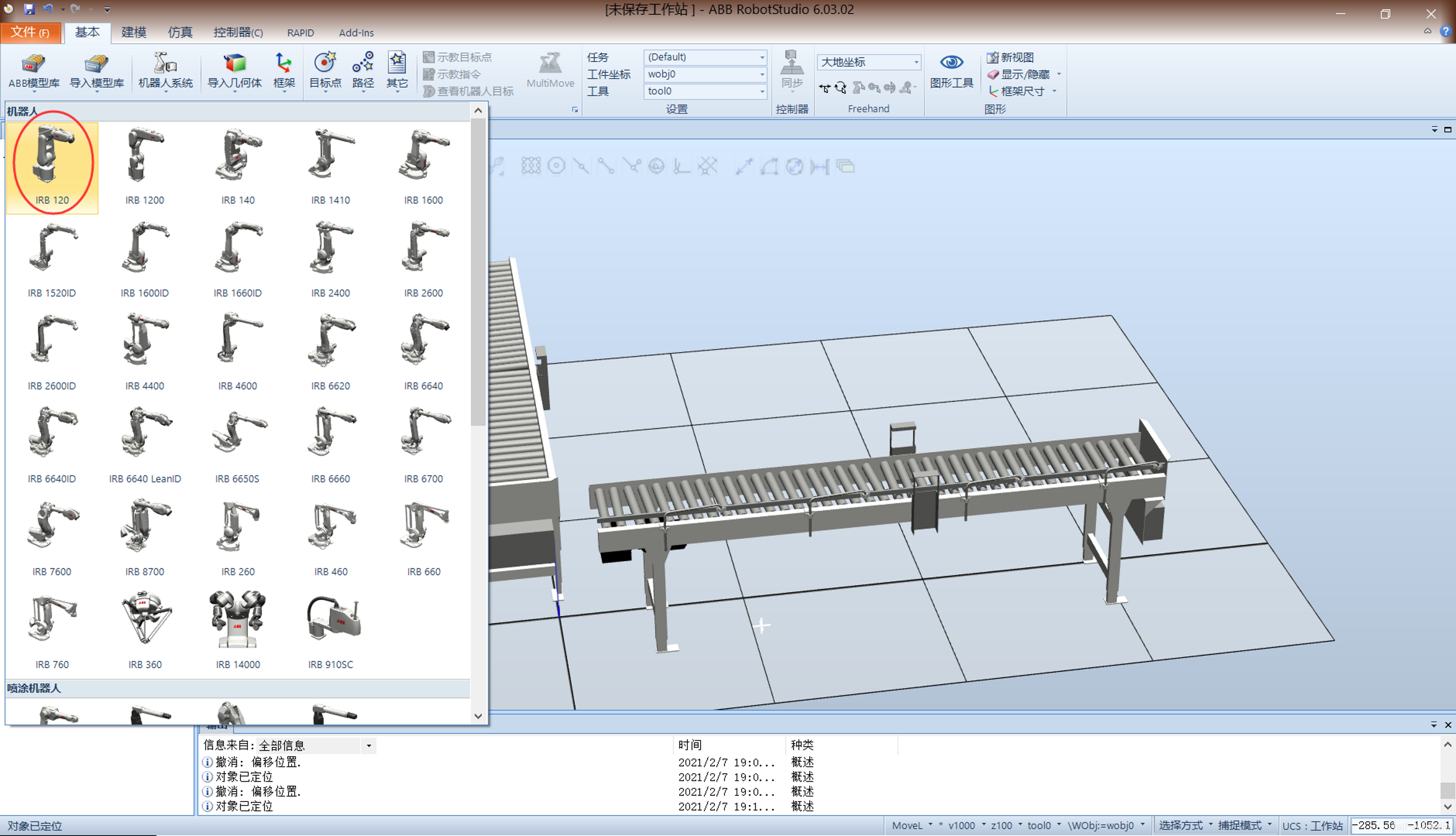
- 导入机器人IRB120,将其移动到合适的位置上。
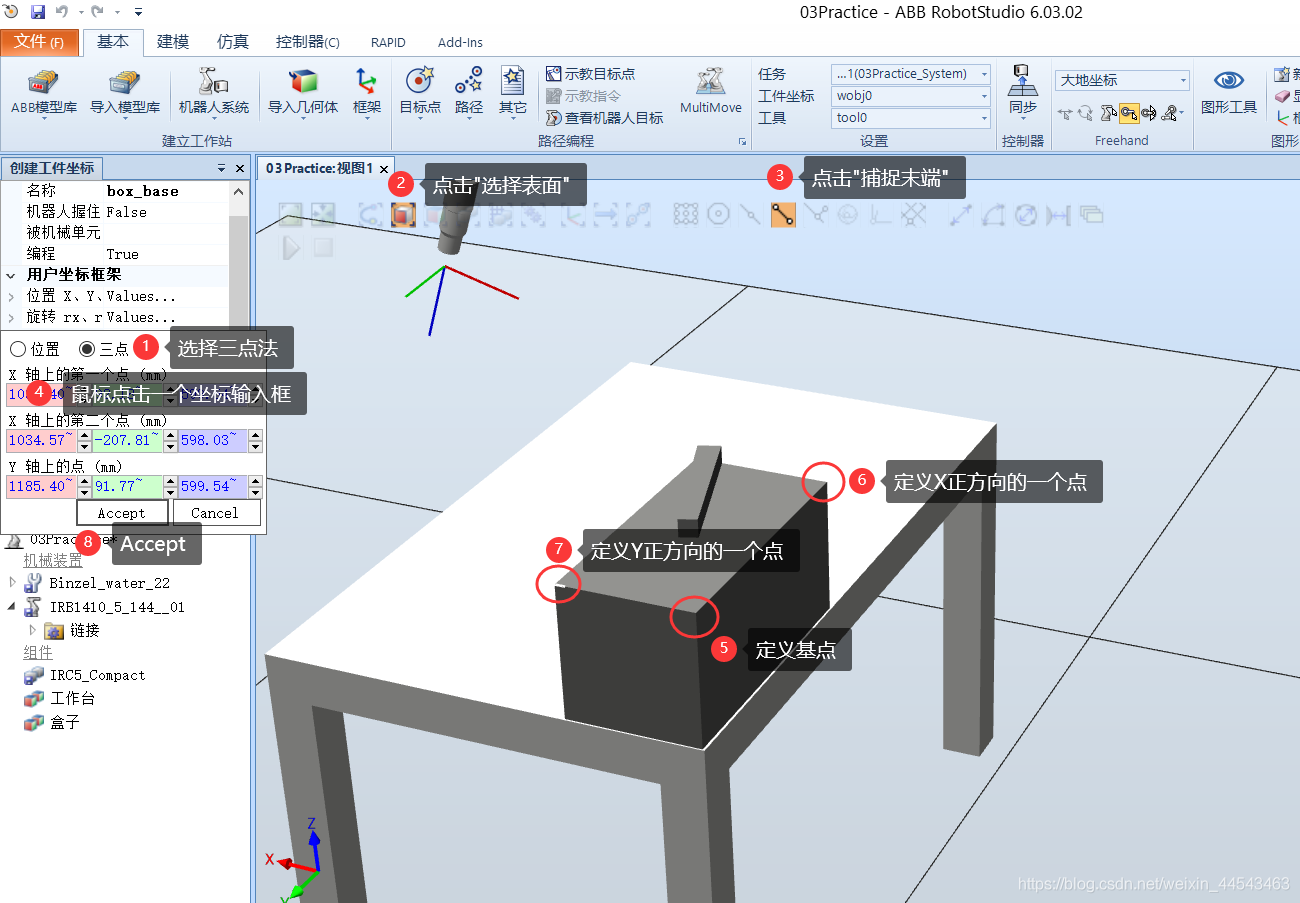
- 创建工件的模型,将工件的第二部分内的物体拖动到第一部分中,形成一个部件
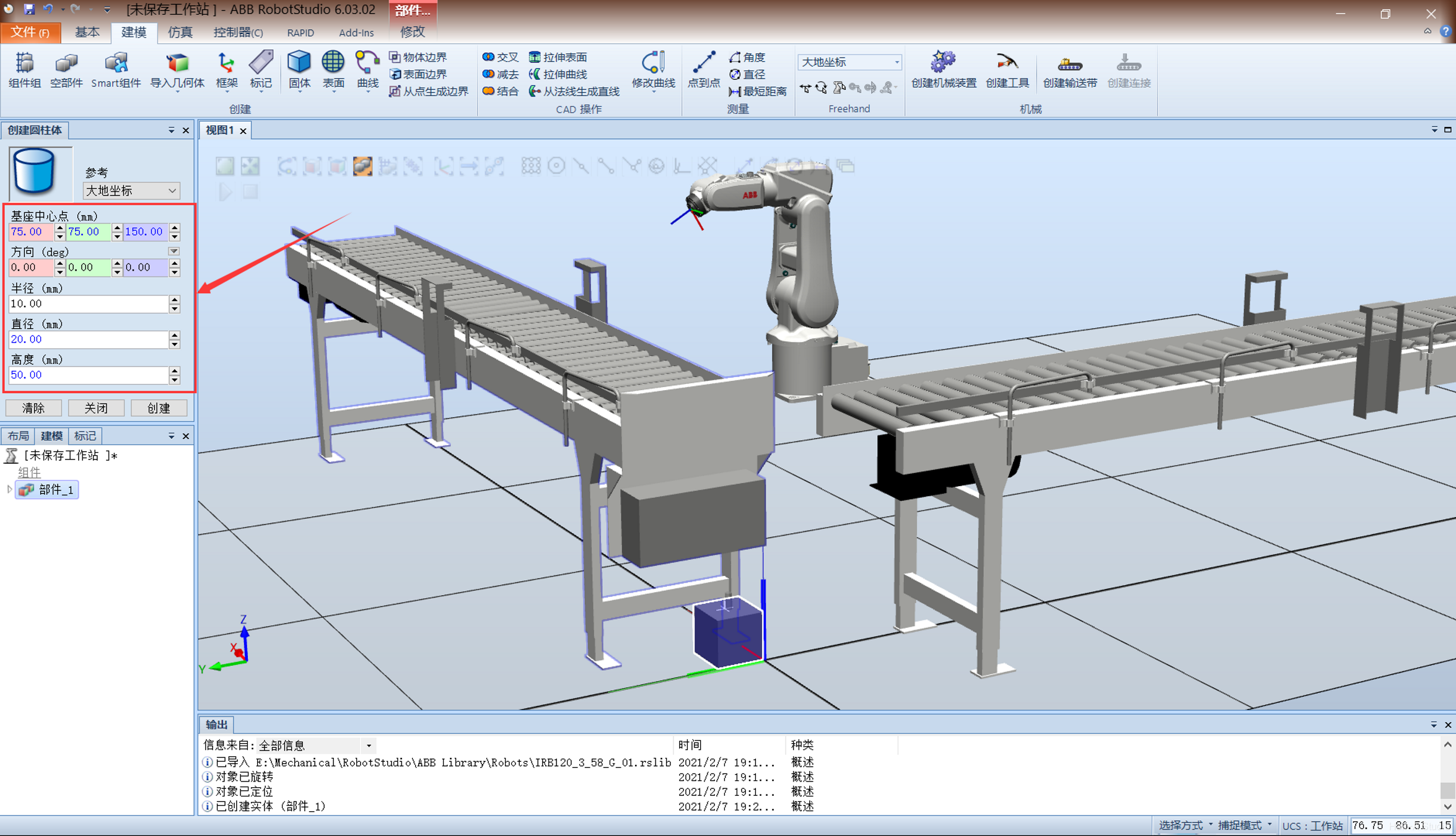
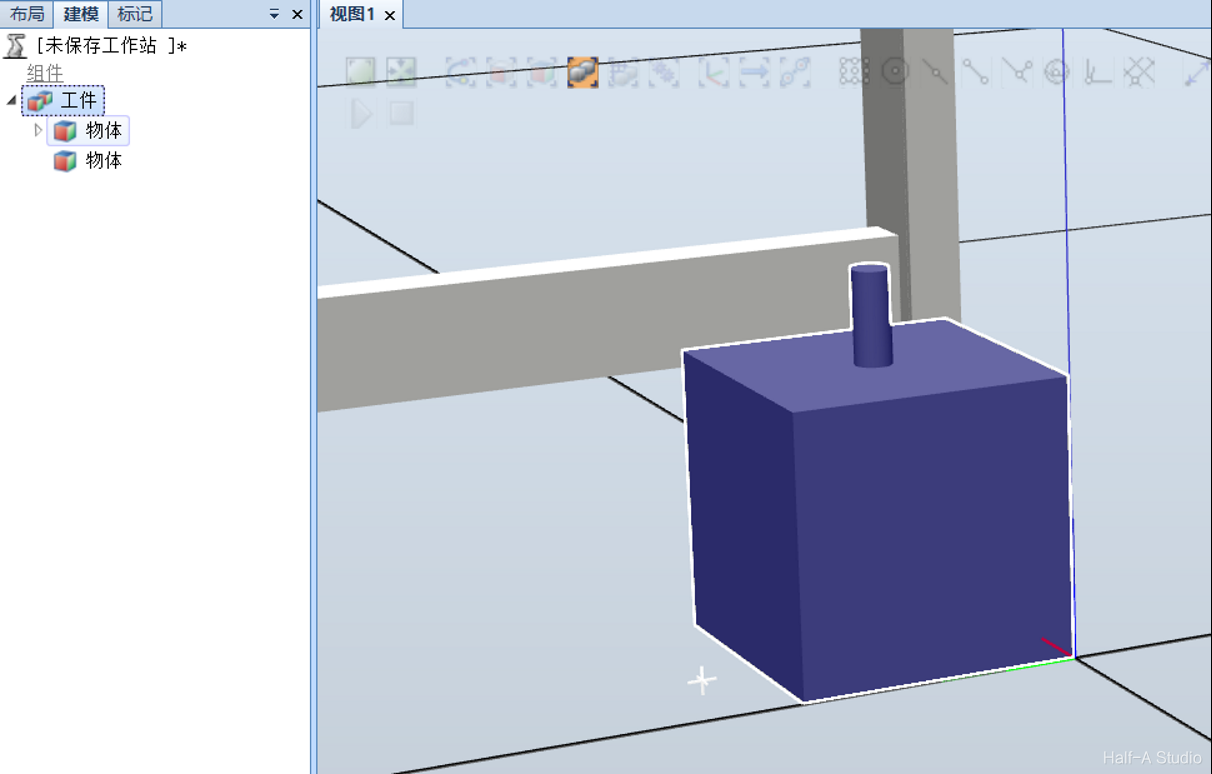
- 将工件移动到合适的位置
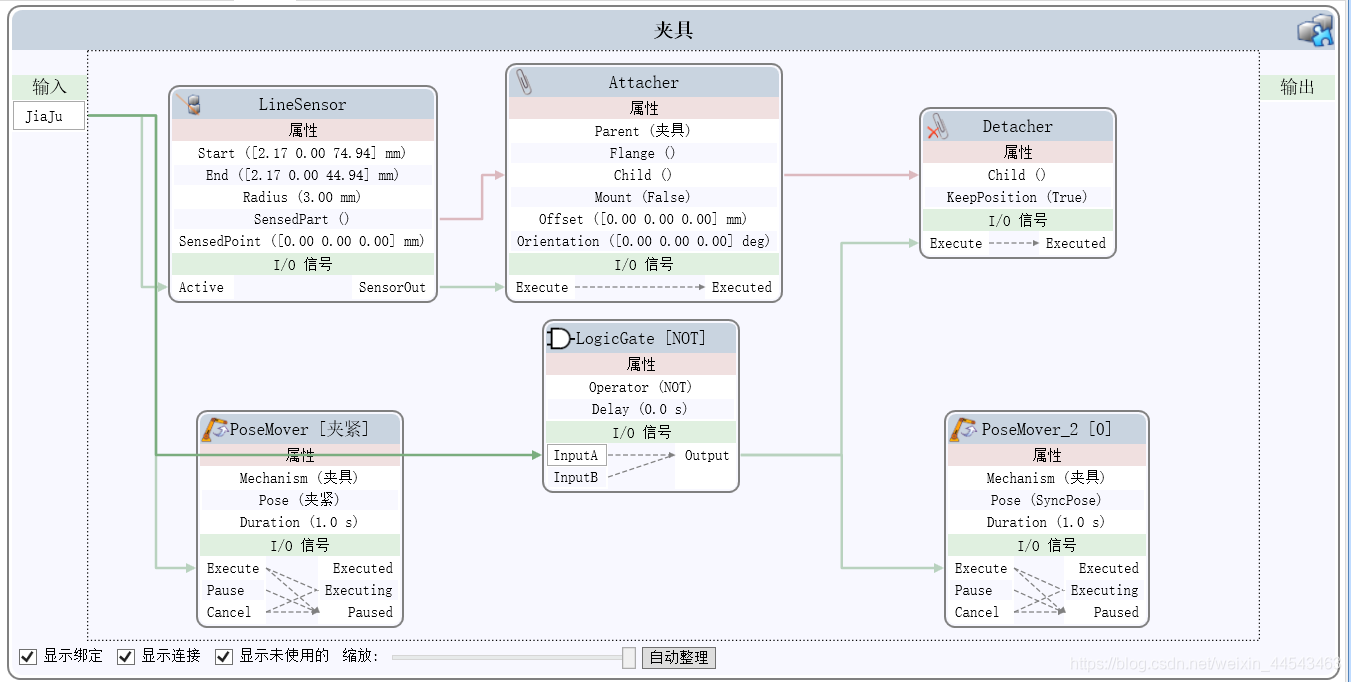
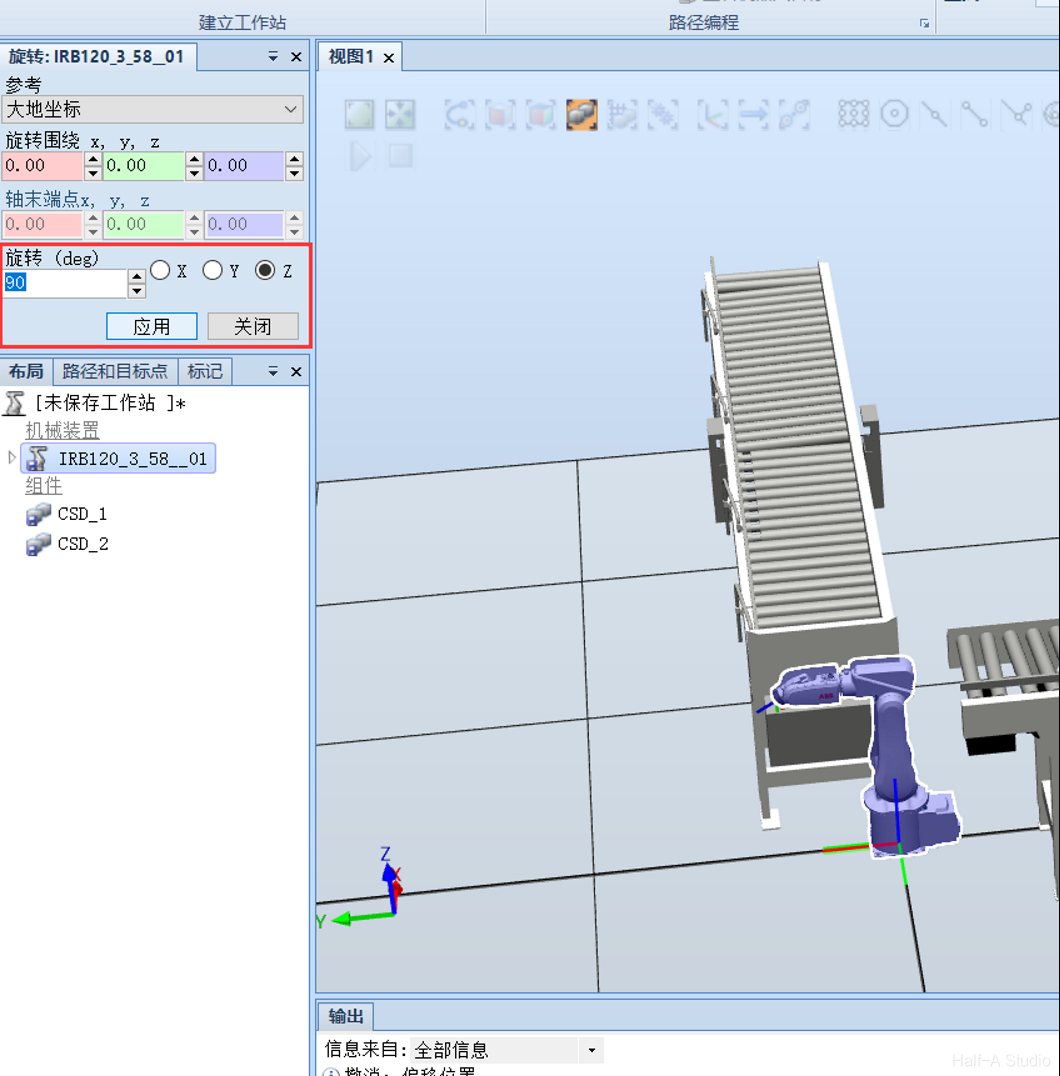
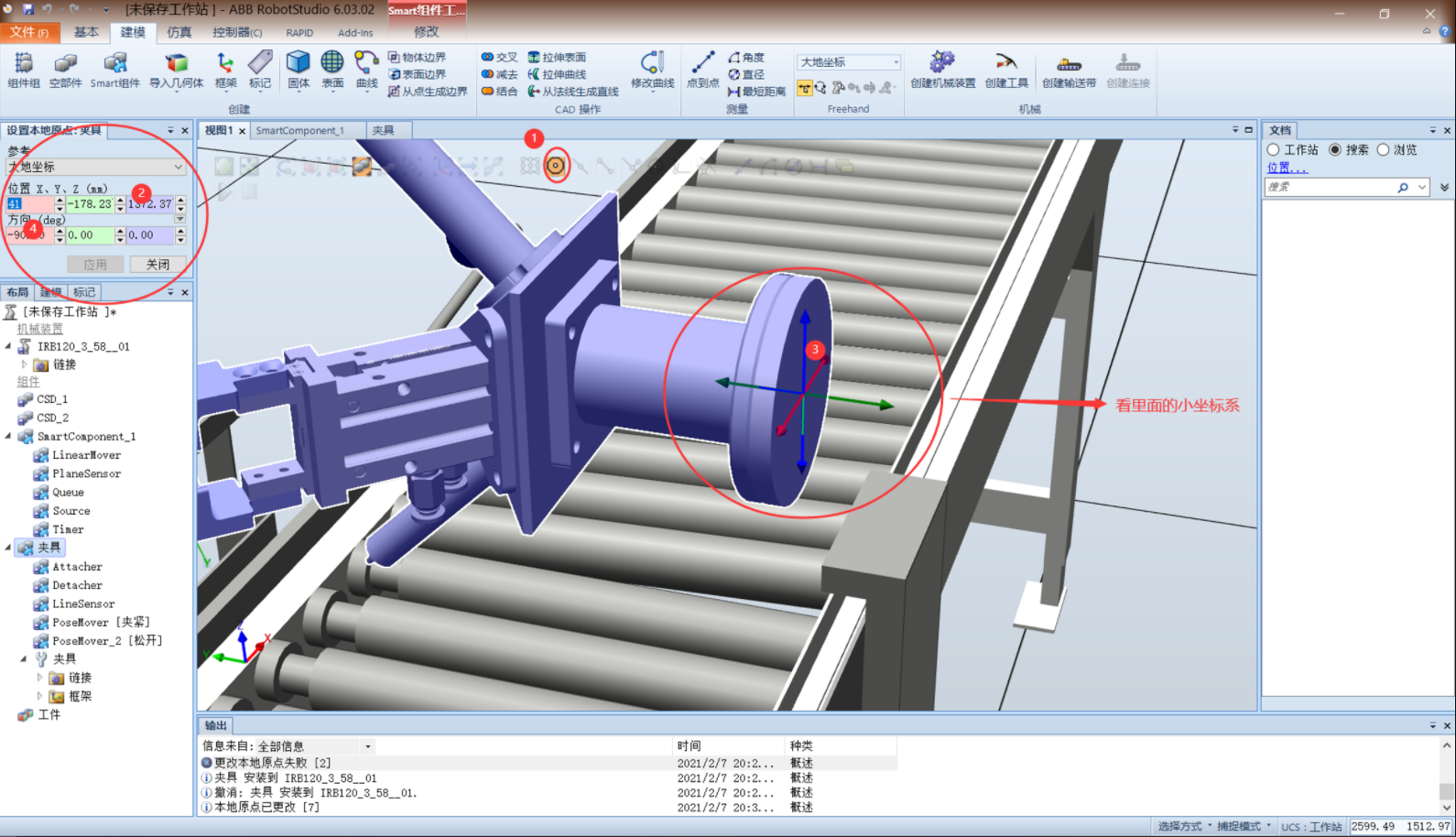
- 导入夹具,将夹具旋转至与大地坐标系平行

- 设置夹具的本地坐标
- 在左侧布局栏中,将夹具拖动到机器人上,更新夹具的位置

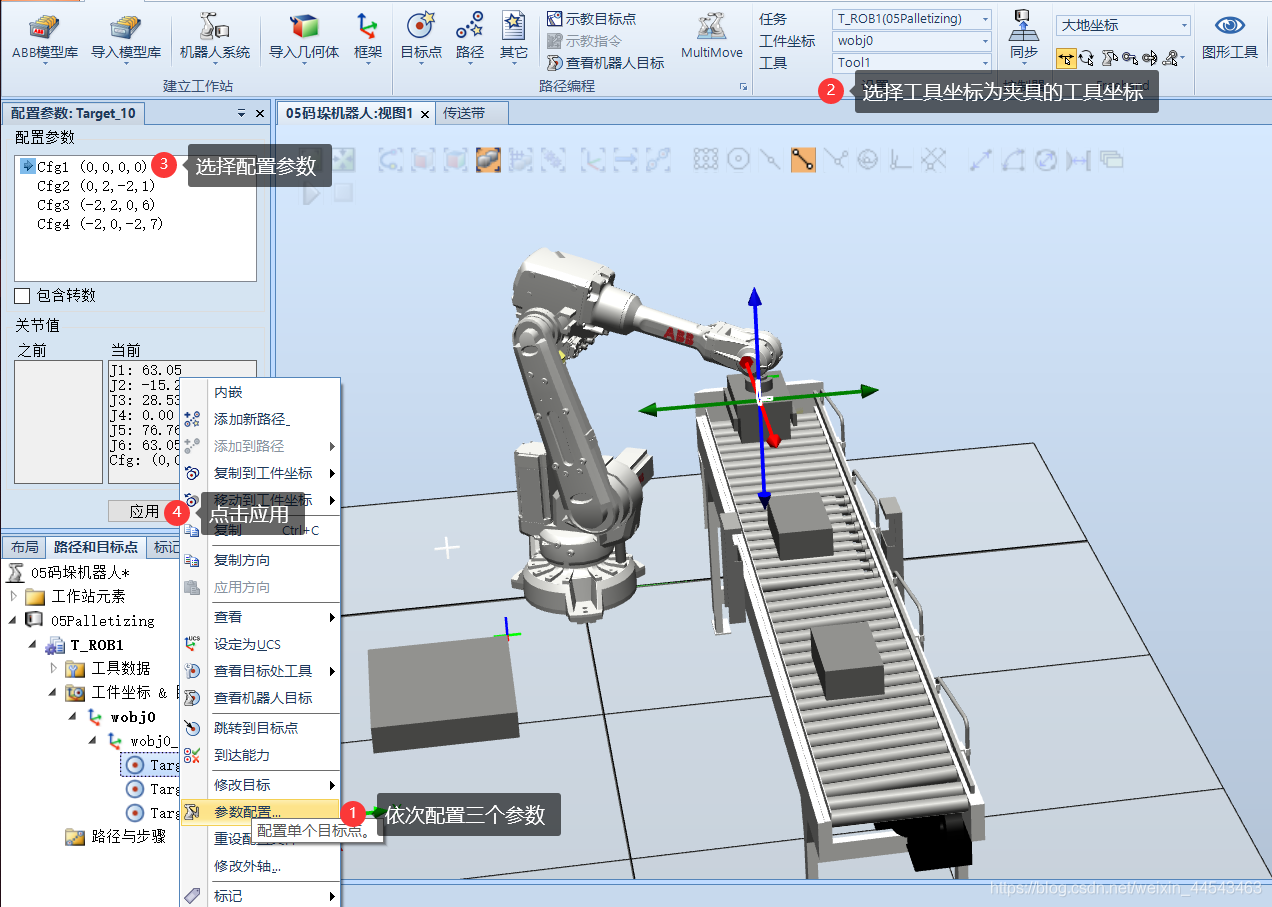
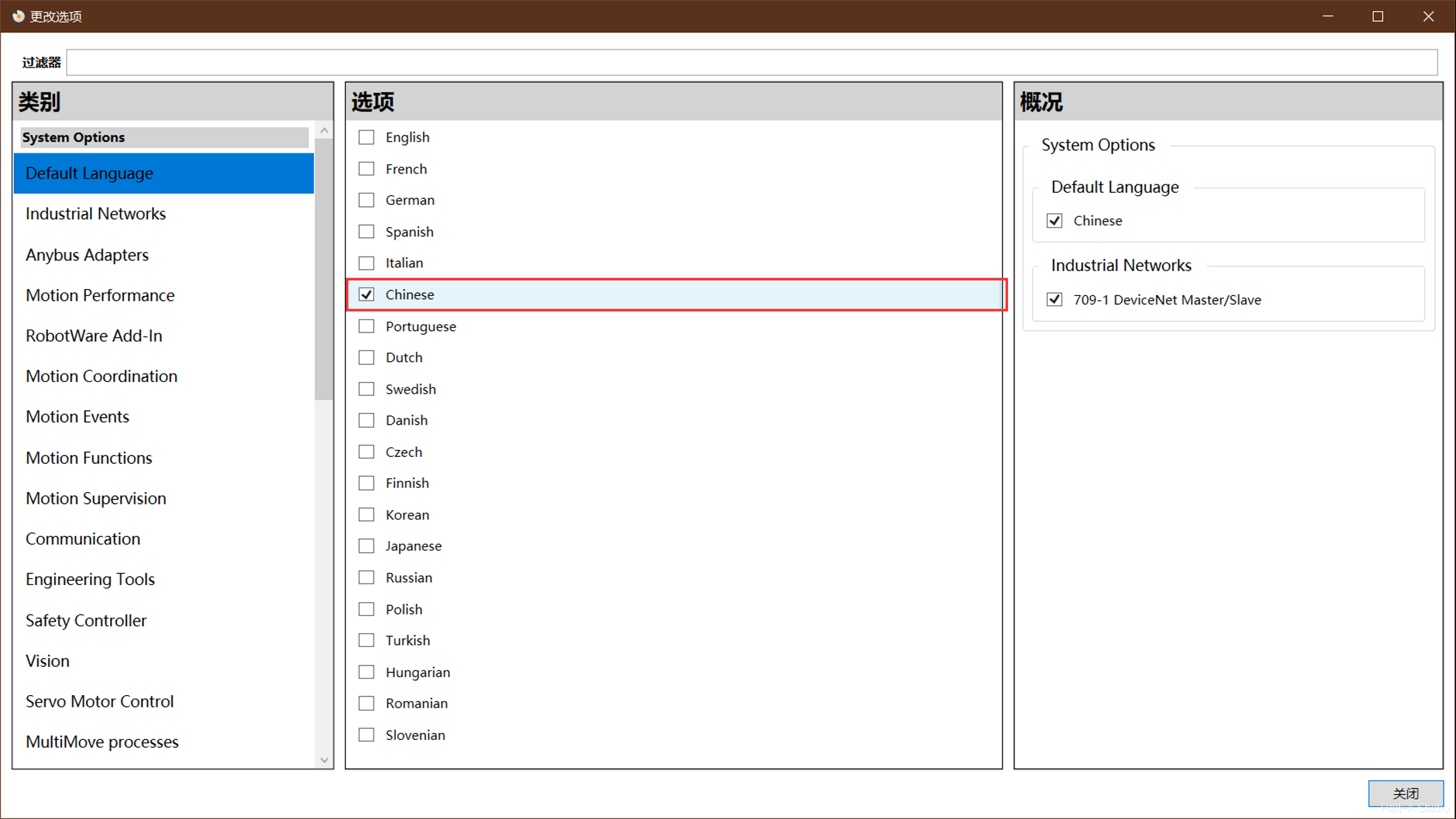
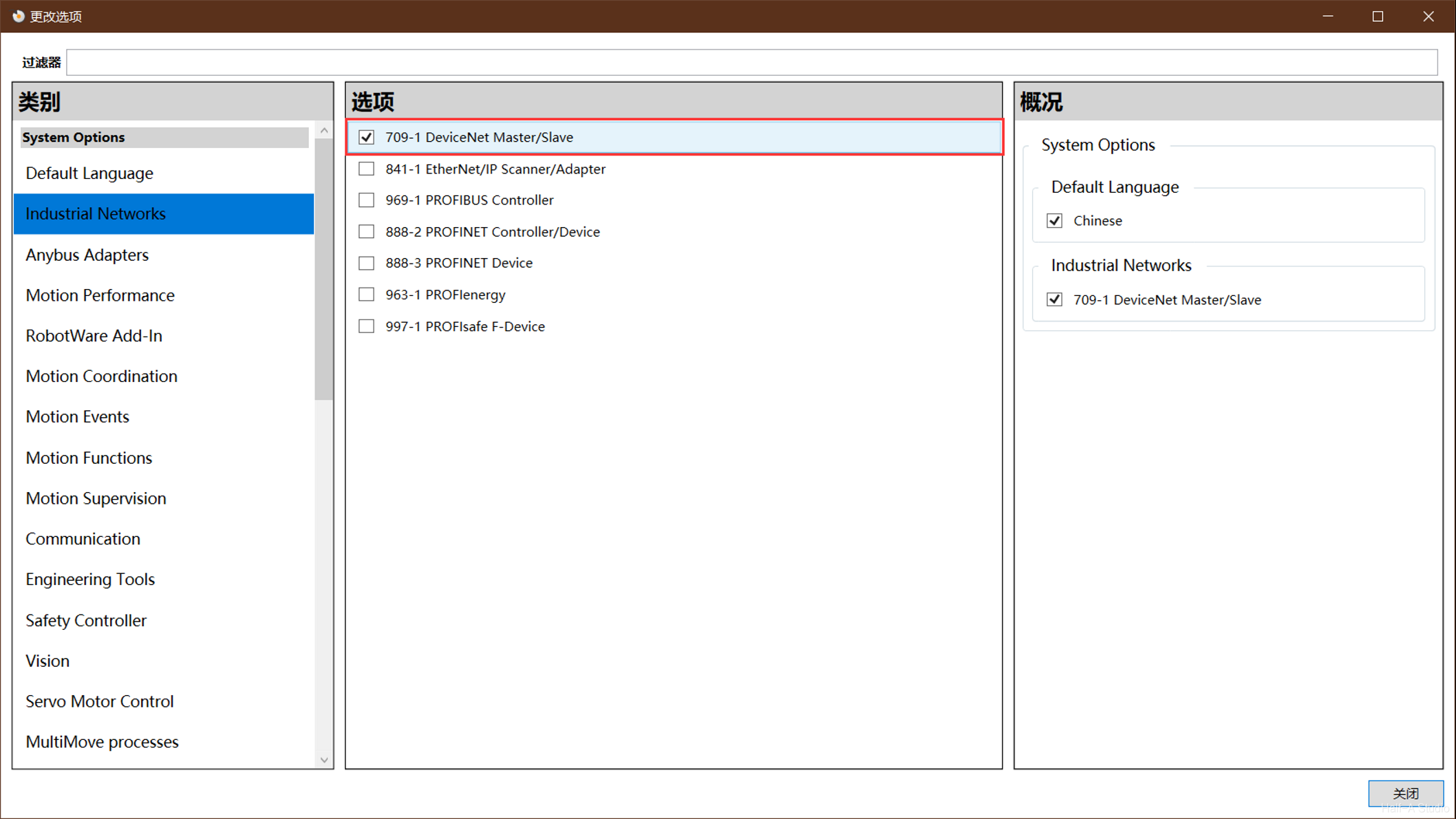
创建机器人系统

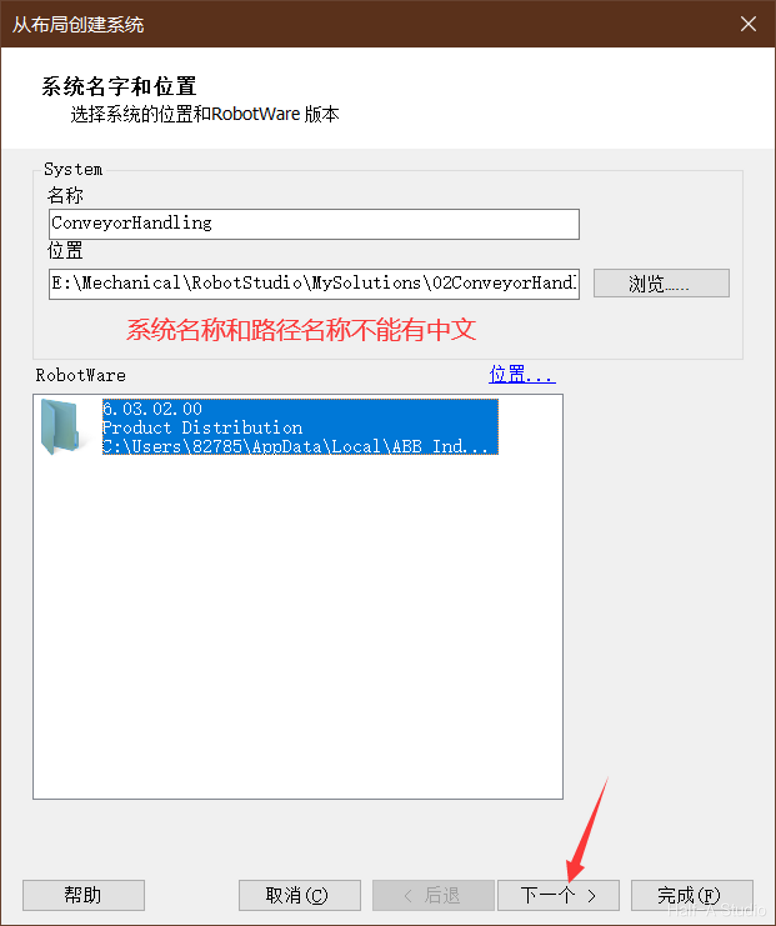

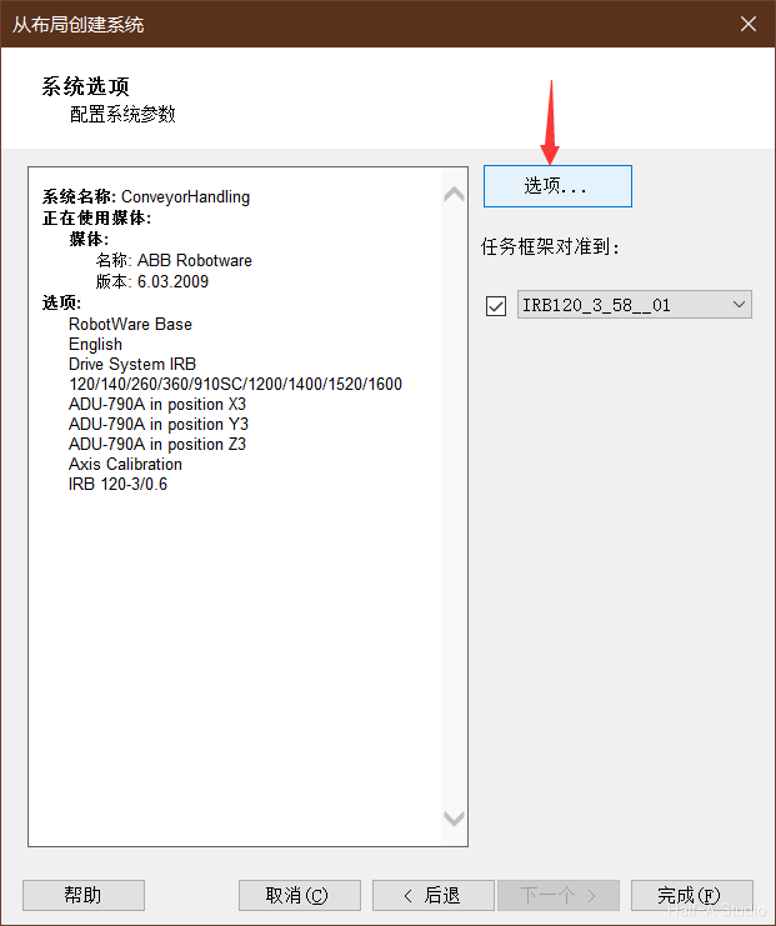

等待一段时间,等待系统创建完成即可进行传送带的试验。
 微信支付
微信支付 支付宝
支付宝
评论