二相四线制步进电机驱动原理与Proteus仿真
一、L298N
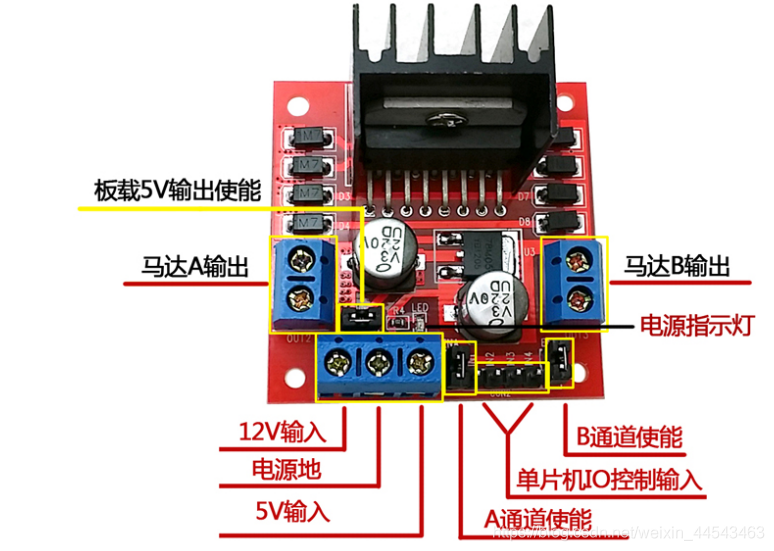
单片机无法直接驱动步进电机,需要L298N进行驱动。L298N的最大功耗为20W,驱动部分端子供电范围+5~+30V,控制信号输入电压范围5V/0V,驱动部分峰值电流2A。
二、两相四线制步进电机
1. 技术指标
(1)相数:电机内部的线圈组数。
(2)拍数:完成一个磁场周期性变化所需要脉冲数或导电状态。两相四线电机可以使用单四拍、双四拍和八拍的方式驱动。
(3)步距角:磁场变化一次电机转过的角度,两相四线电机步距角为0.9°/1.8°。
2. 工作原理

如图所示,电机有四条控制信号A+、A-、B+、B-,通过控制这四条引线上的励磁脉冲,就可以控制步进电机的转动。以四拍驱动方式为例,顺时针转动时
| STEP | A+ | A- | B+ | B- | |
|---|---|---|---|---|---|
| 1 | 1 | 0 | 0 | 0 | |
| 2 | 0 | 1 | 0 | 0 | |
| 3 | 0 | 0 | 1 | 0 | |
| 4 | 0 | 0 | 0 | 1 | |
| **ps:**电动机的旋转方向由脉冲顺序决定,转动速度和脉冲频率有关。 |
三、接线方法
- 控制端:IN1、IN2、IN3、IN4接单片机的四个管脚,用于给出脉冲
- 输入端:5V输入接板载5V,12V输入外接电源
- 使能端:ENA、ENB接板载5V,默认使能
- 输出端:OUT1、OUT2、OUT3、OUT4分别接步进电机的四条线红绿黄蓝。
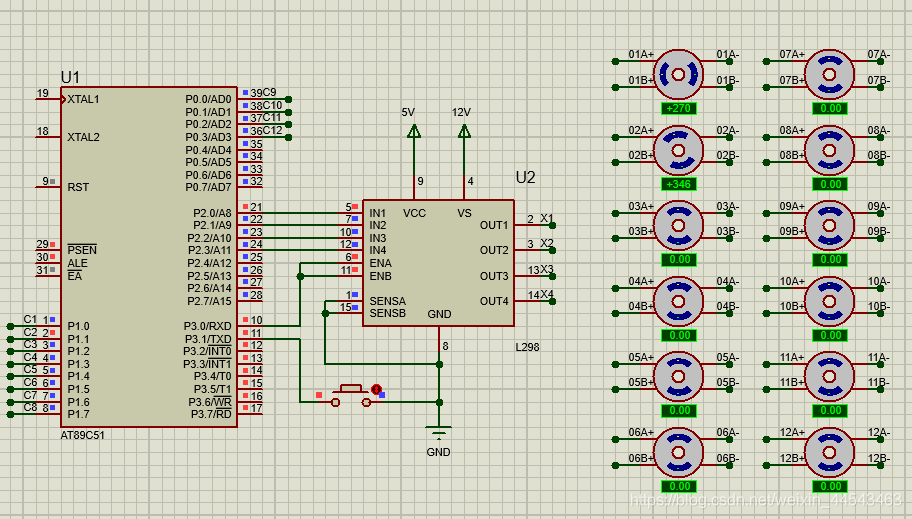
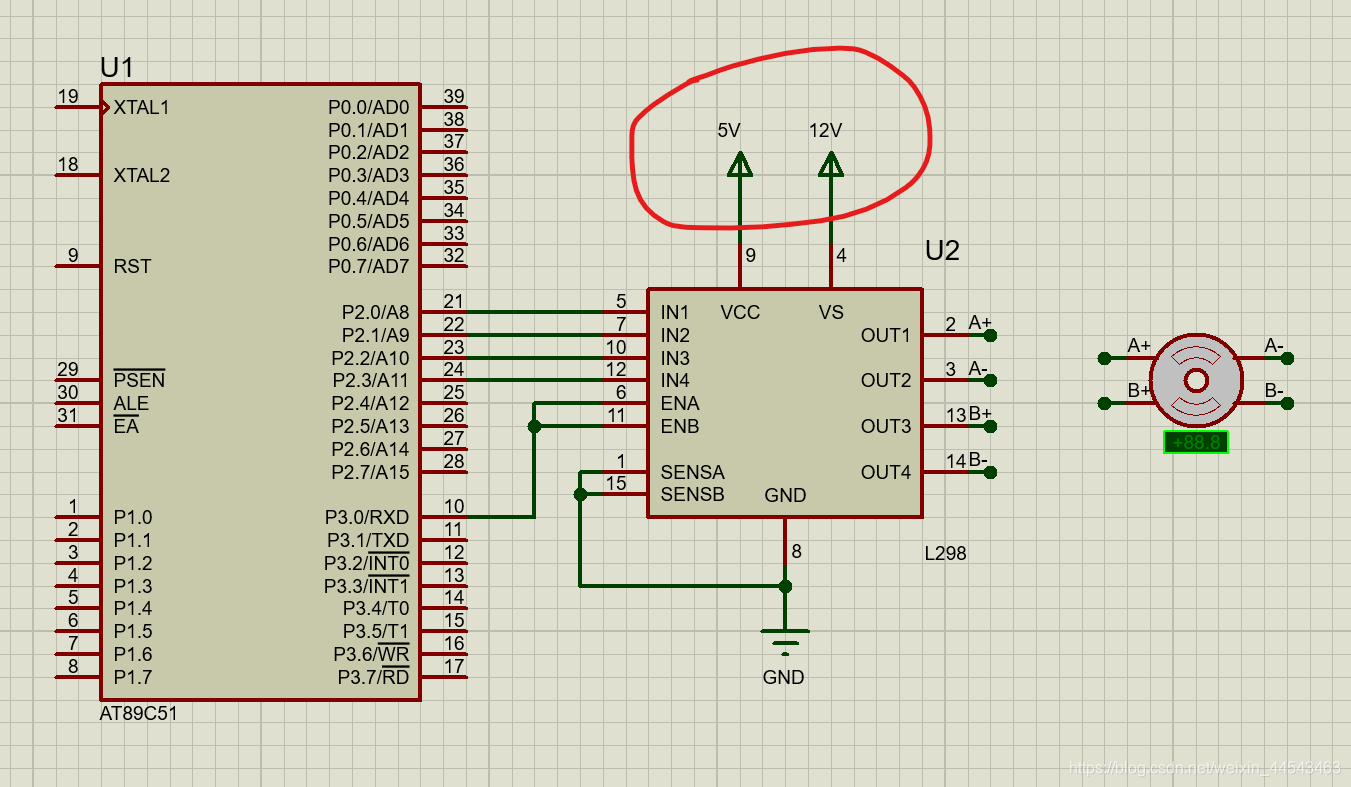
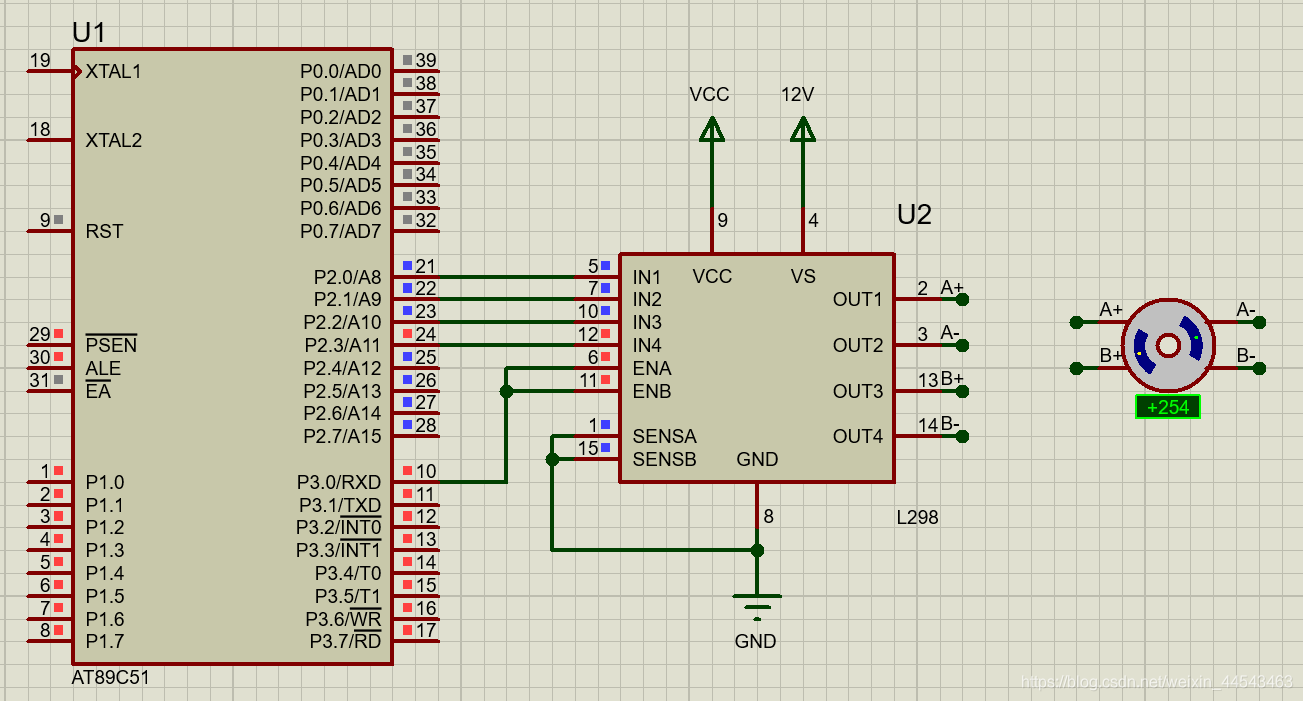
三、Proteus仿真
在Proteus中的接线情况如下图所示:

参考程序如下:
1 | #include<reg52.h> |
仿真结果:
 微信支付
微信支付 支付宝
支付宝
评论