RobotStudio机器人运行路径的创建与仿真
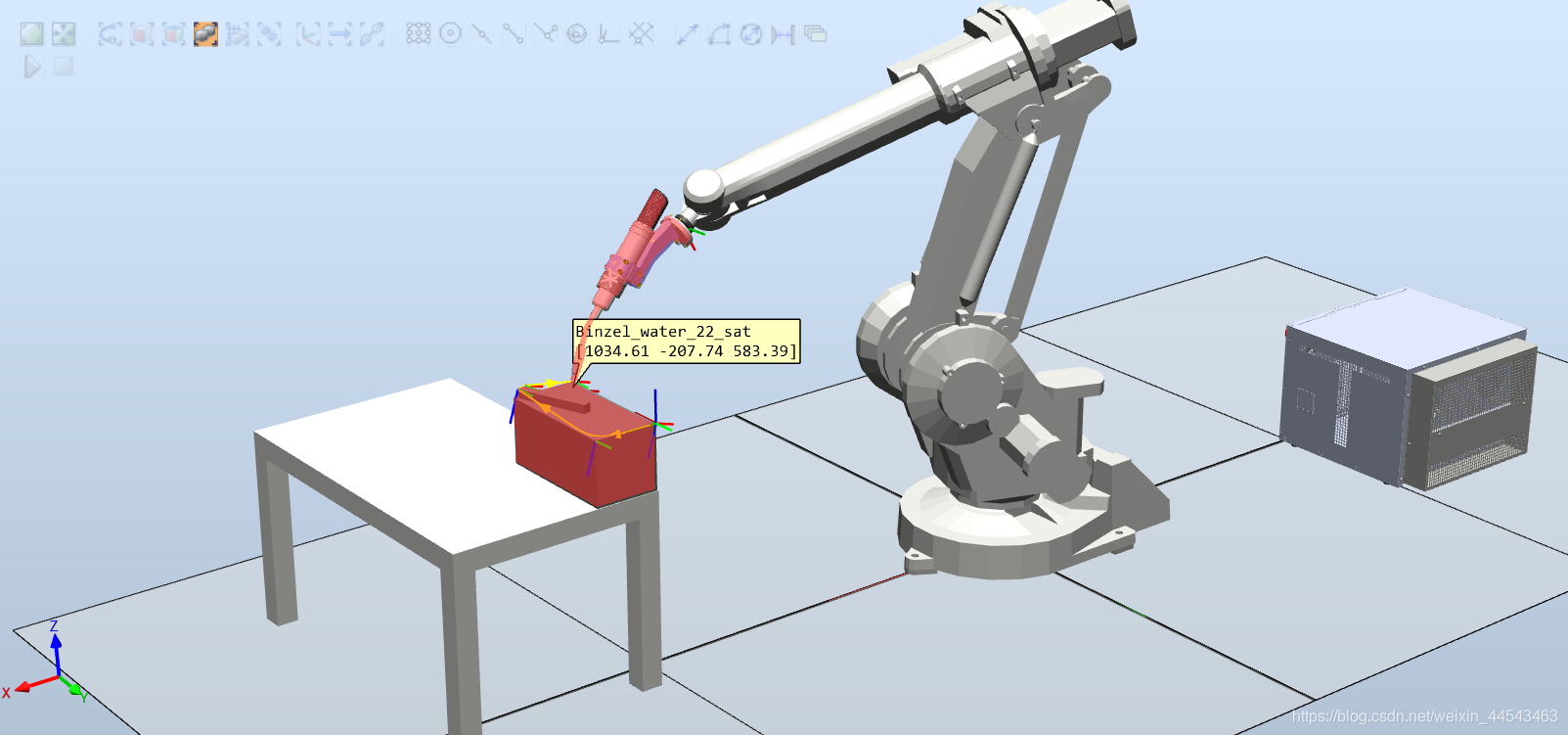
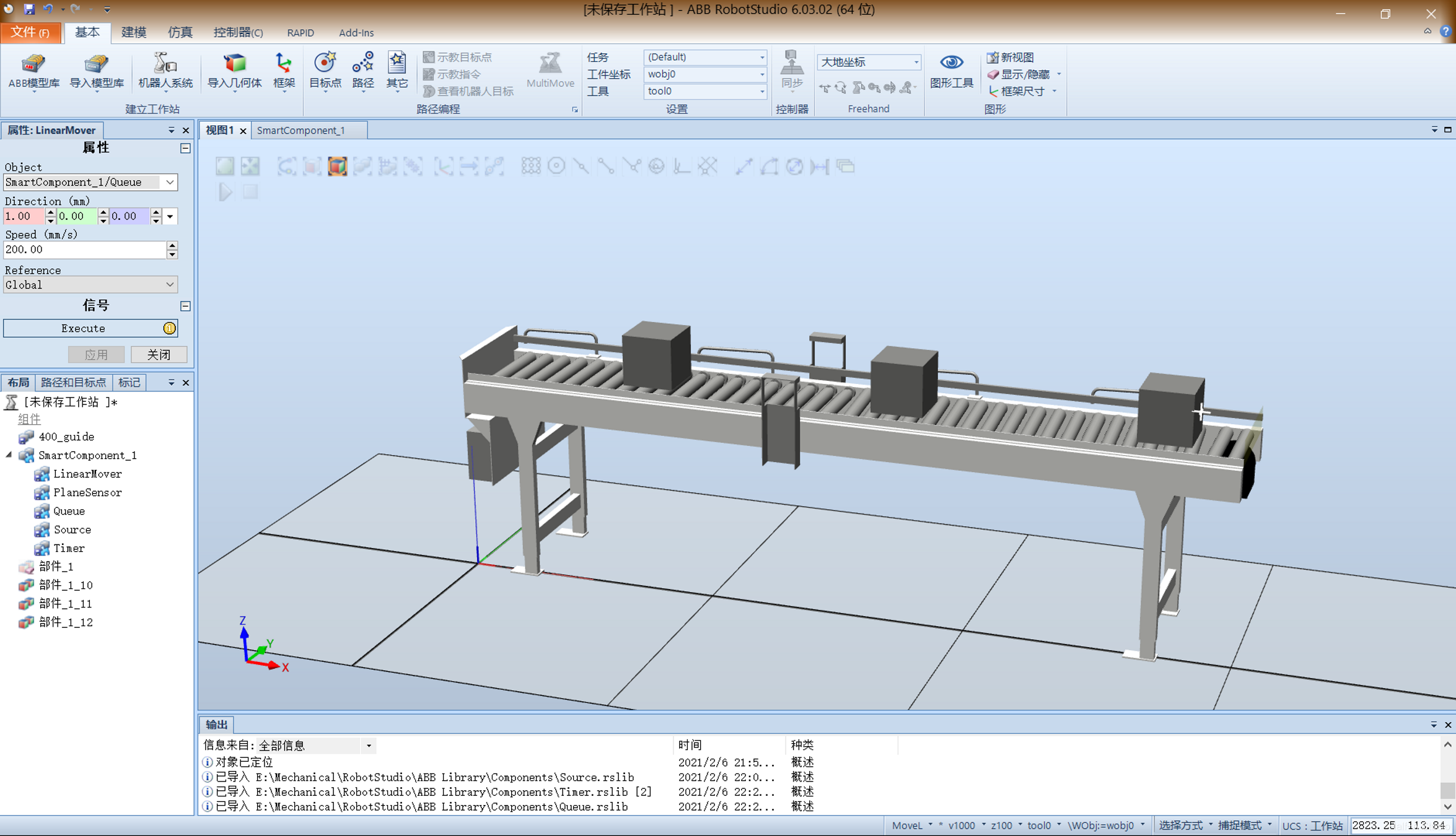
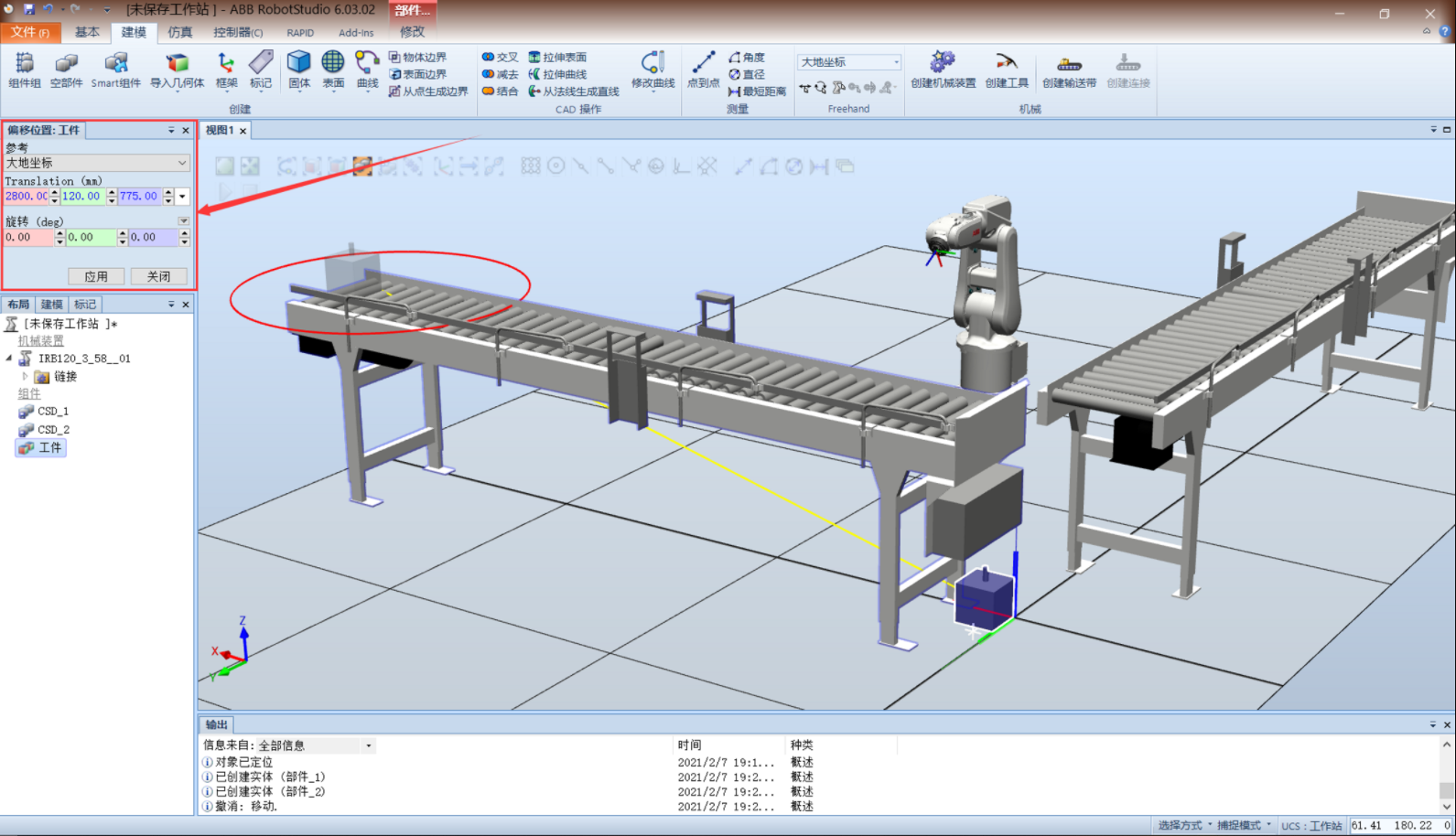
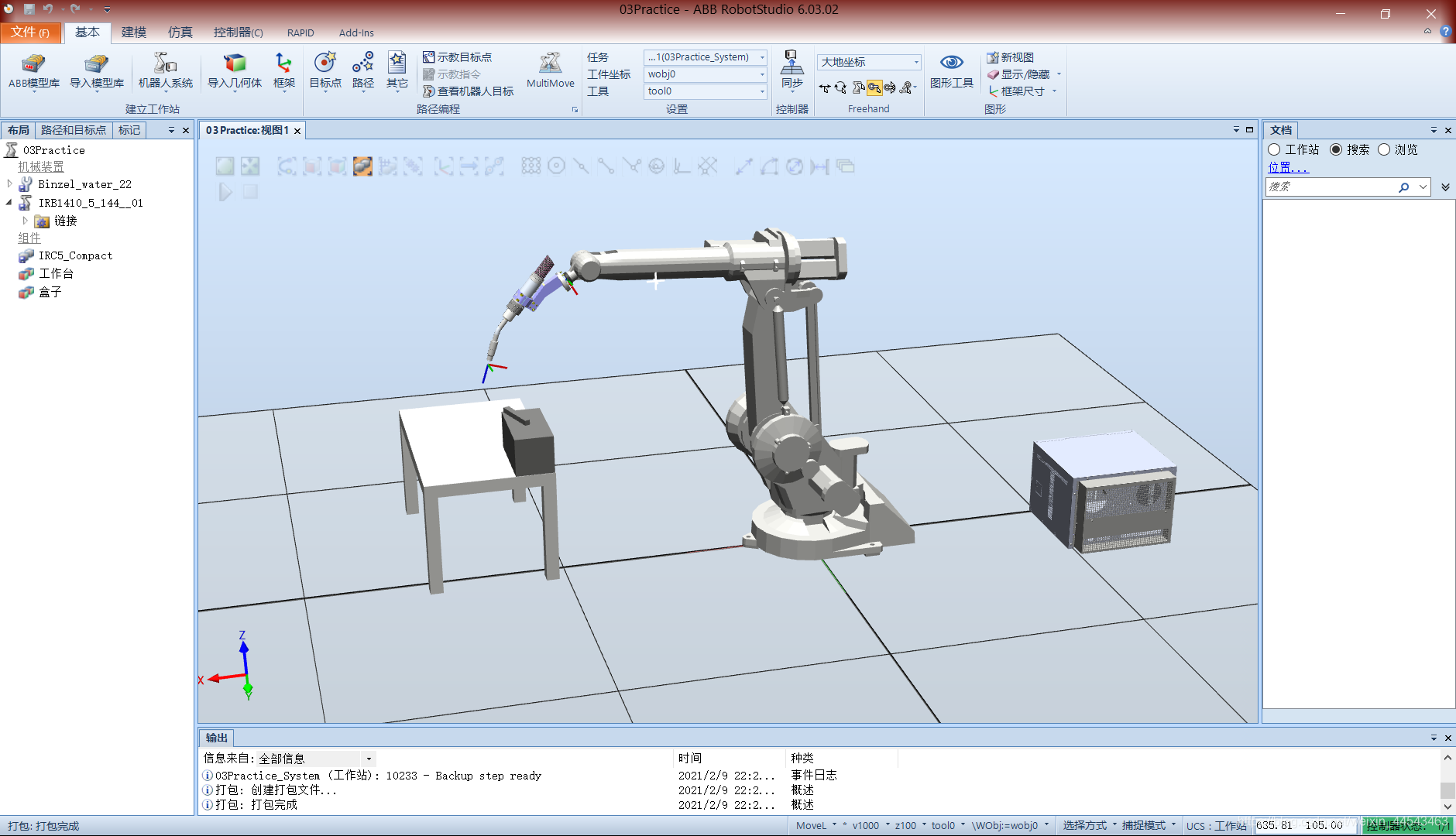
本文在一个已经搭建好机械模型,同时完成机器人系统的创建后的机器人运行路径的创建过程。初始时的界面如下:
工程文件已上传到网盘
包括:初始工程文件(03Practice_init.rspag)、完成后的工程文件(03Practice.rspag)、模型文件
链接:https://pan.baidu.com/s/1f0RL-iLBm2Kxd0NbLduv0Q
提取码:rs03
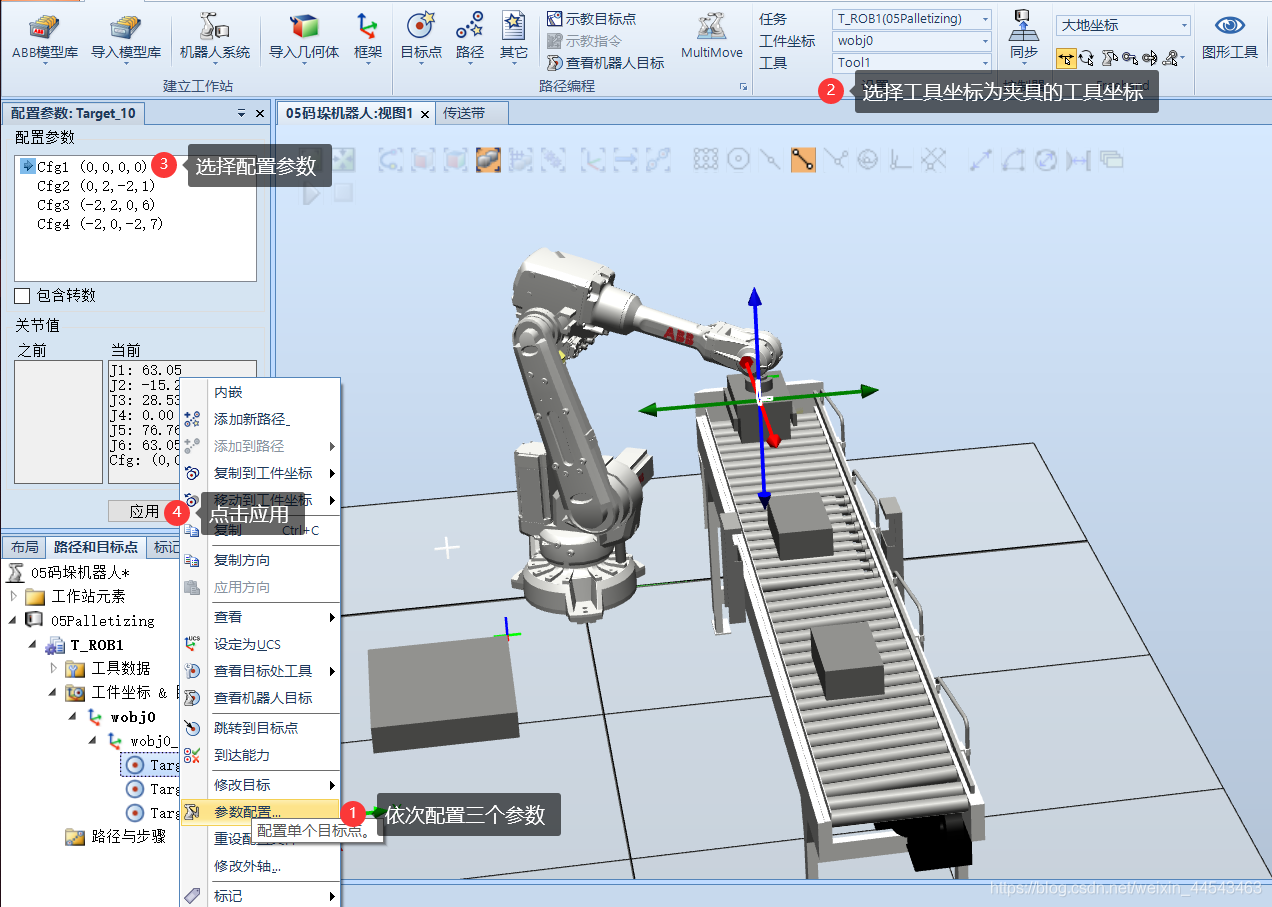
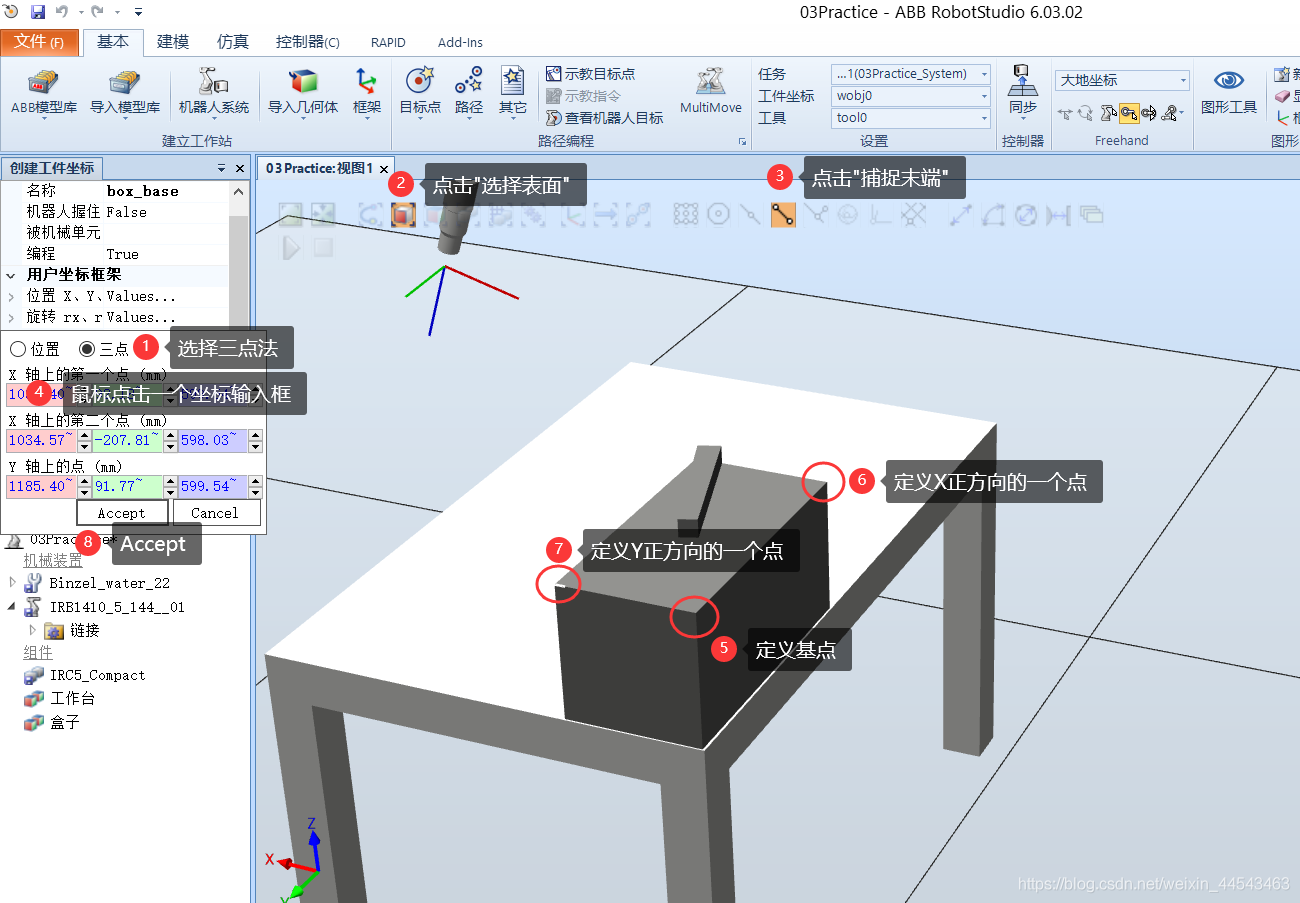
工件坐标的创建

运行路径的创建
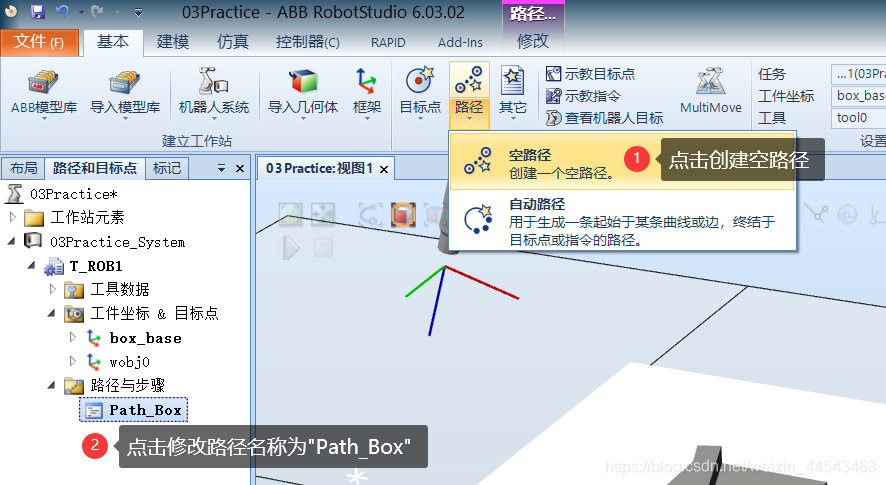
- 首先创建一个空路径
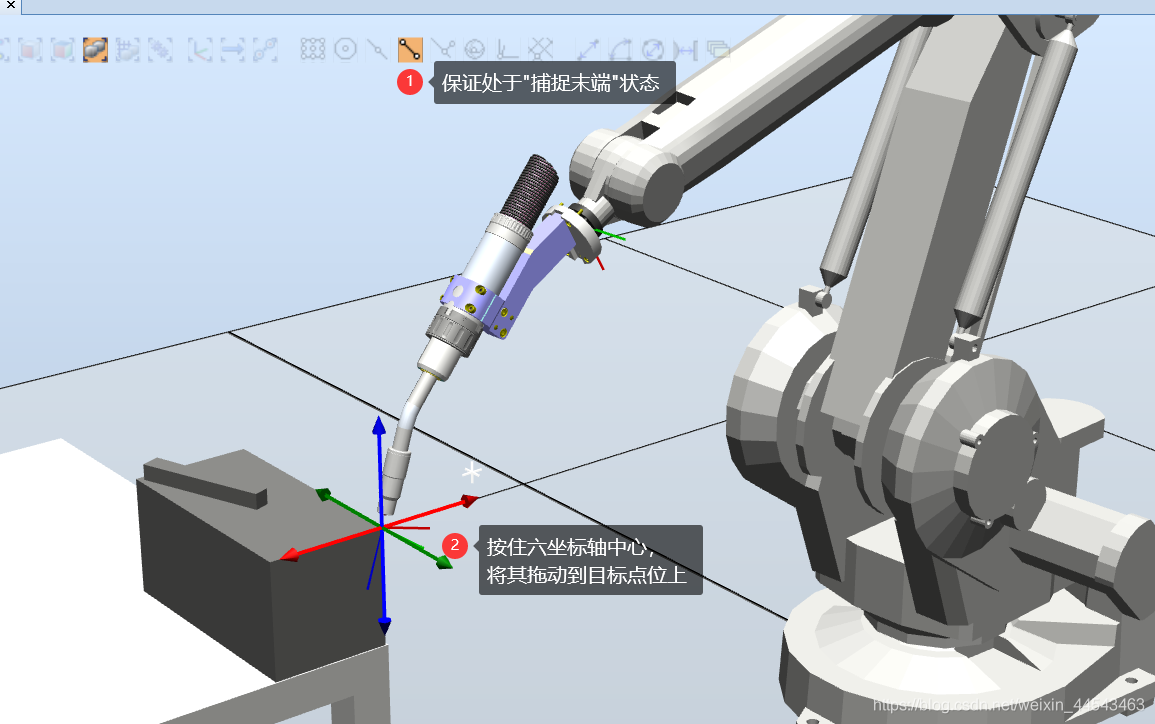
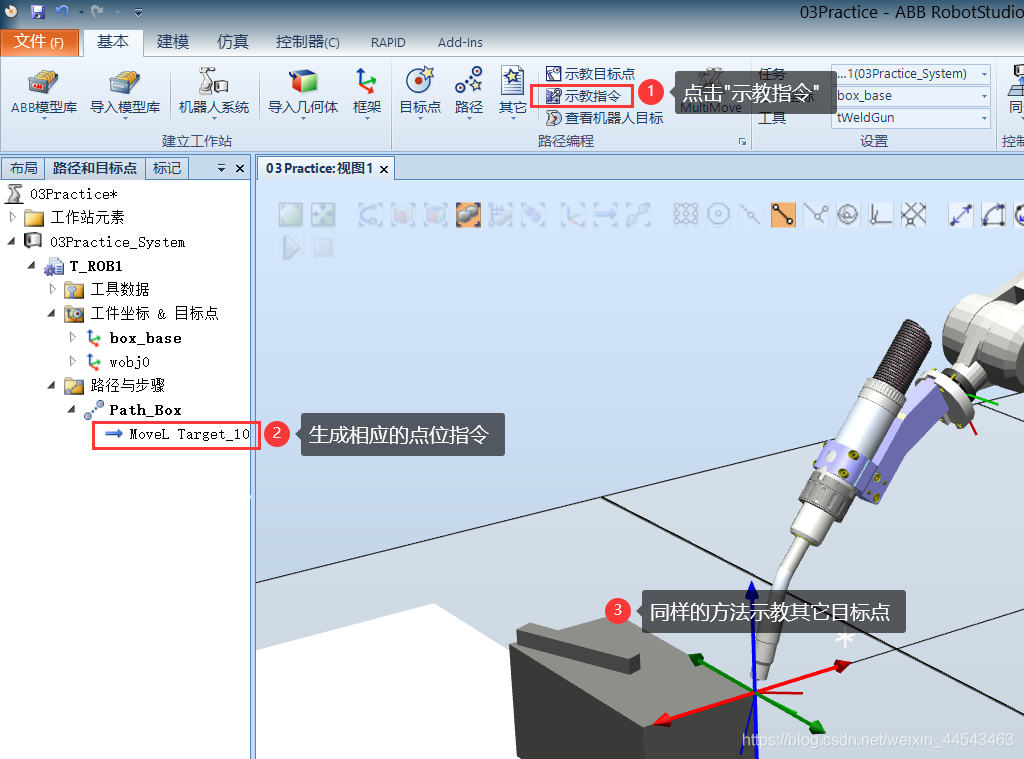
- 改变机器人的姿态,使工具移动到目标点进行示教。
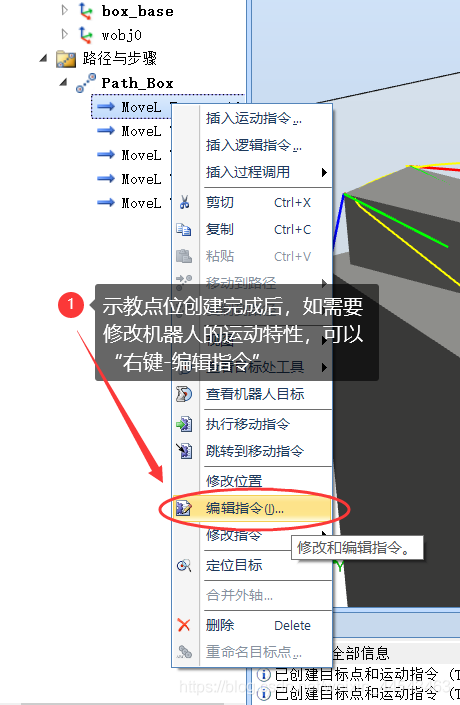
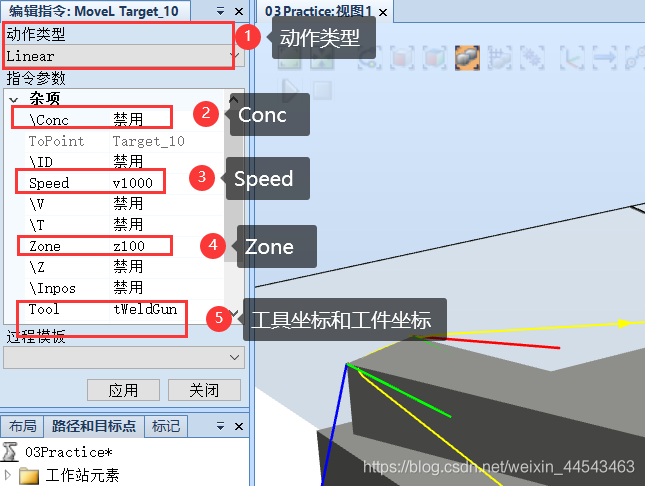
- 动作类型
- Joint:机器人以点到点的形式到此点(不走直线,各轴自由运动)
- Linear:机器人以直线运行方式从上一点运行到下一点
- Conc
- 禁用:机器人会精确到达此点
- 启用:机器人会依据Zone的参数,略过此点
- Speed:机器人的运动速度
- Zone:启用Conc时,机器人掠过目标点所经过圆弧轨迹的半径
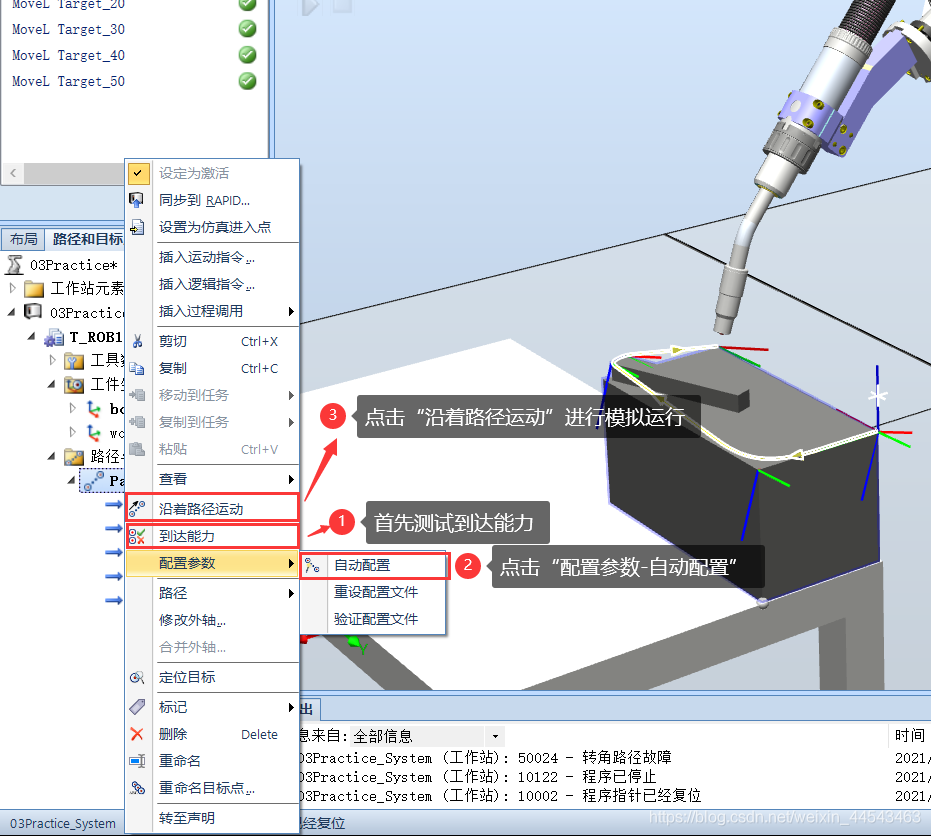
- 测试到达能力并进行模拟运行
仿真与录像
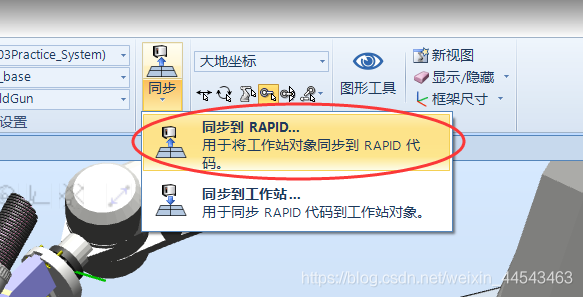
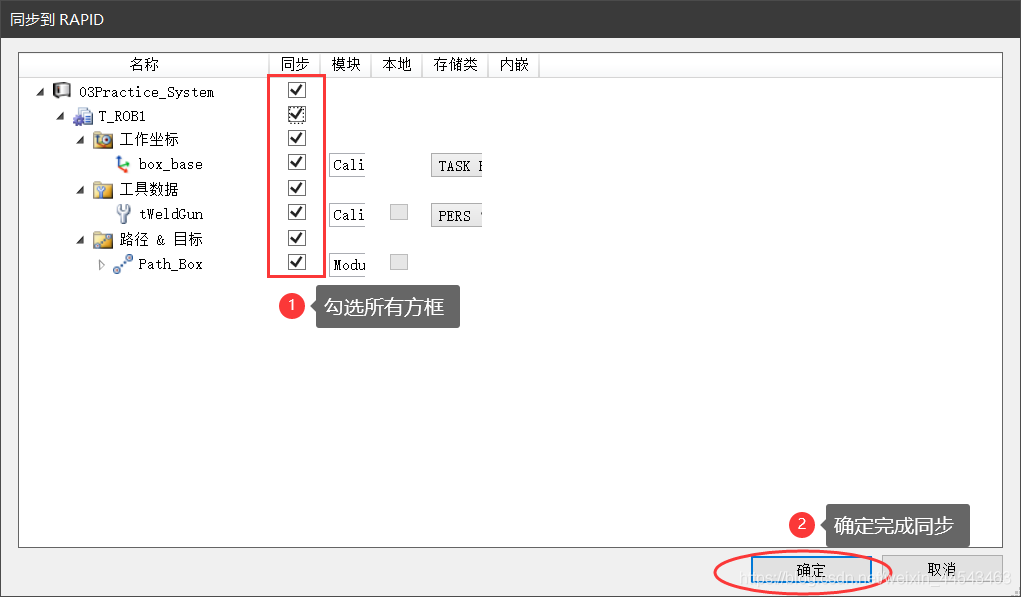
- 将工作站同步到Rapid代码
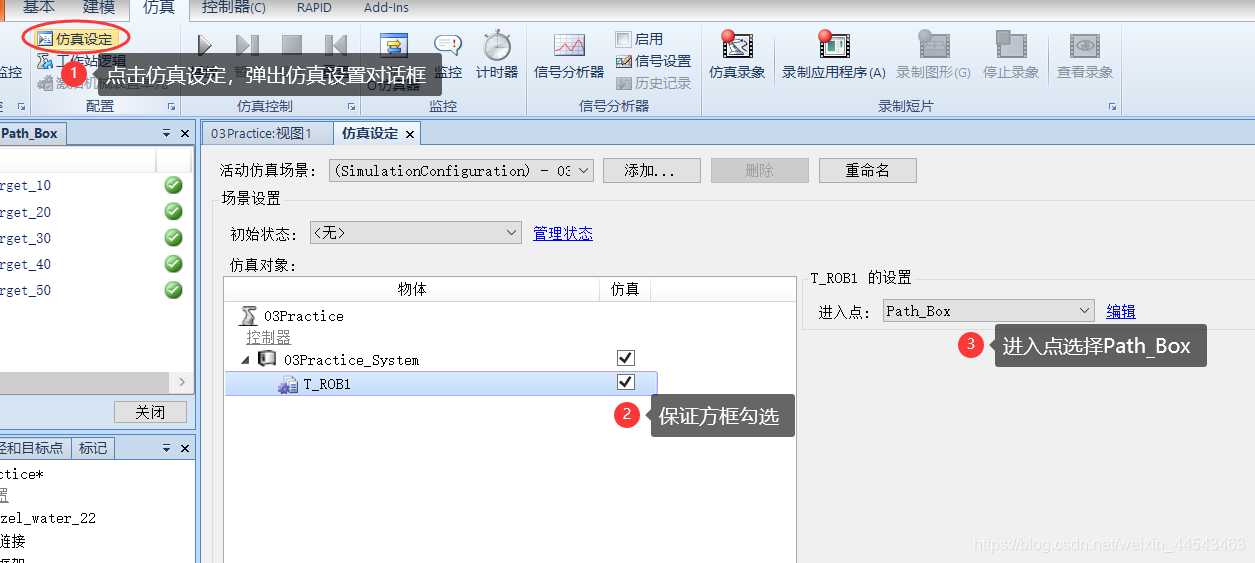
- 进行仿真设定
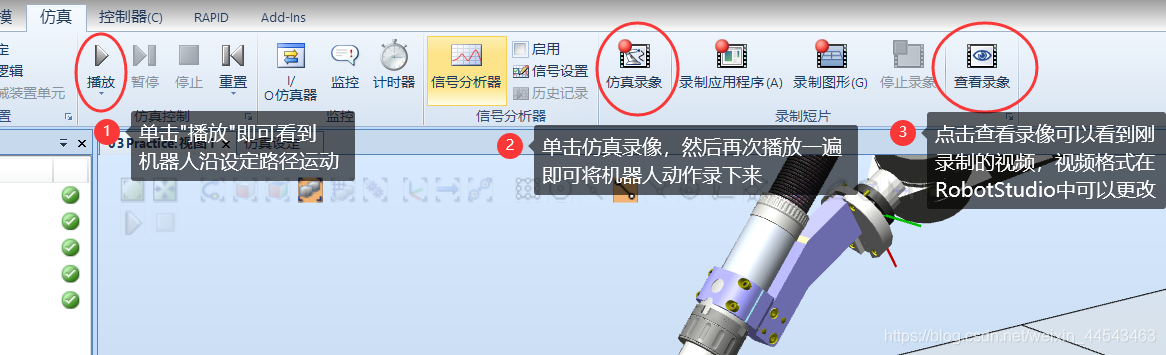
- 播放并录制保存仿真视频。(录制的视频默认保存在 我的电脑/视频 目录下)
 微信支付
微信支付 支付宝
支付宝
评论