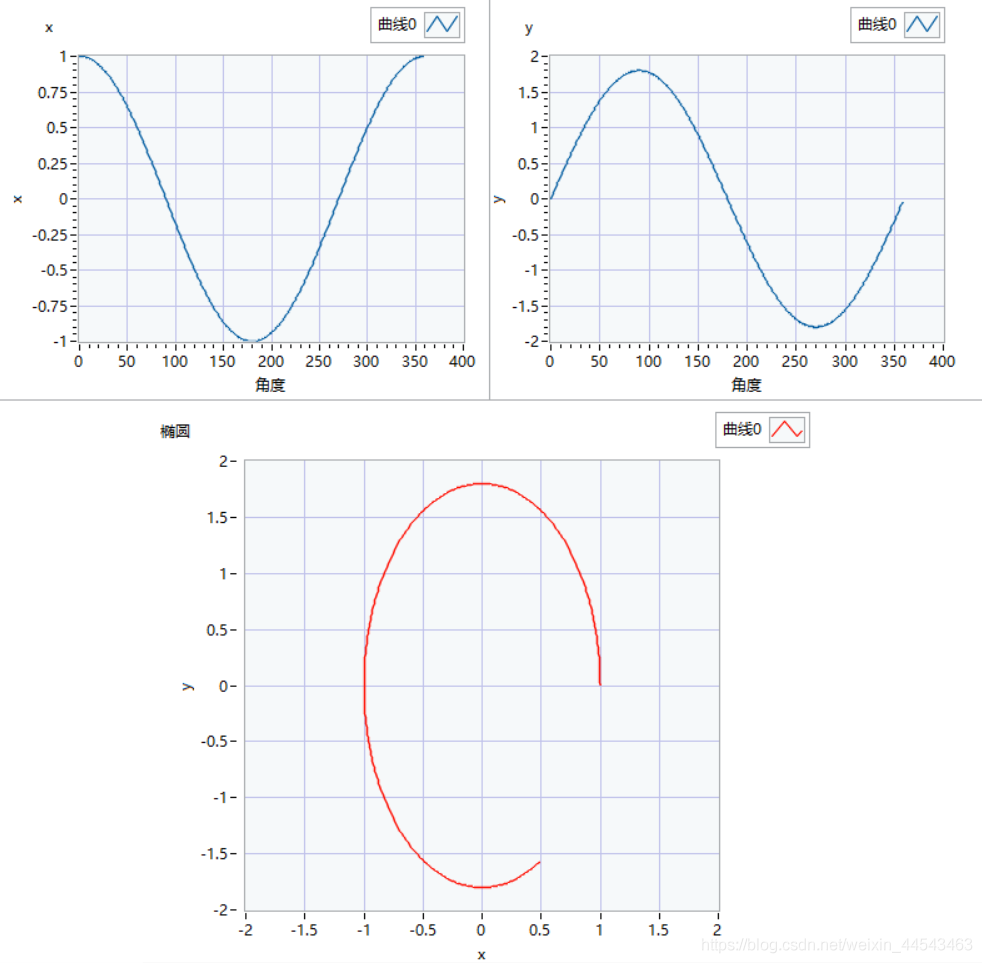
Labview绘制圆/椭圆
for循环是固定次数的循环,其也有条件接线端,可以提前结束while循环,相当于C语言的break语句。for循环与数组操作是密不可分的,for循环最重要的功能就是处理数组数据。

【Proteus仿真】220V转5V向单片机供电
所使用元器件包括仿真电源、变压器、桥式整流器、无极电容、电解电容、三端稳压芯片。接线方法如图。
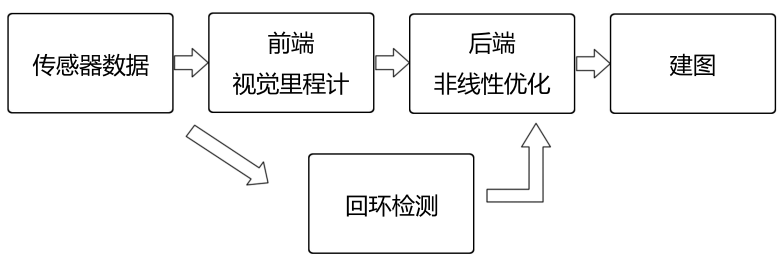
【SLAM笔记】SLAM概述
对于一个移动机器人来说,我们往往需要它知道两件事,我在什么地方(定位),周围环境是什么样(建图)。

前端笔记 | CSS定位
某个元素可以自由的在一个盒子内移动位置,并且压住其他盒子。当滚动窗口时,某些模块是固定在屏幕中的某个位置。以上两个效果通过标准流和浮动都无法快速实现,此时需要定位来实现。
Vscode中HTML与CSS代码的快速写法
Emmet语法的前身是Zen coding,它使用缩写来提高html/css的编写速度,vscode内部已经集成该语法
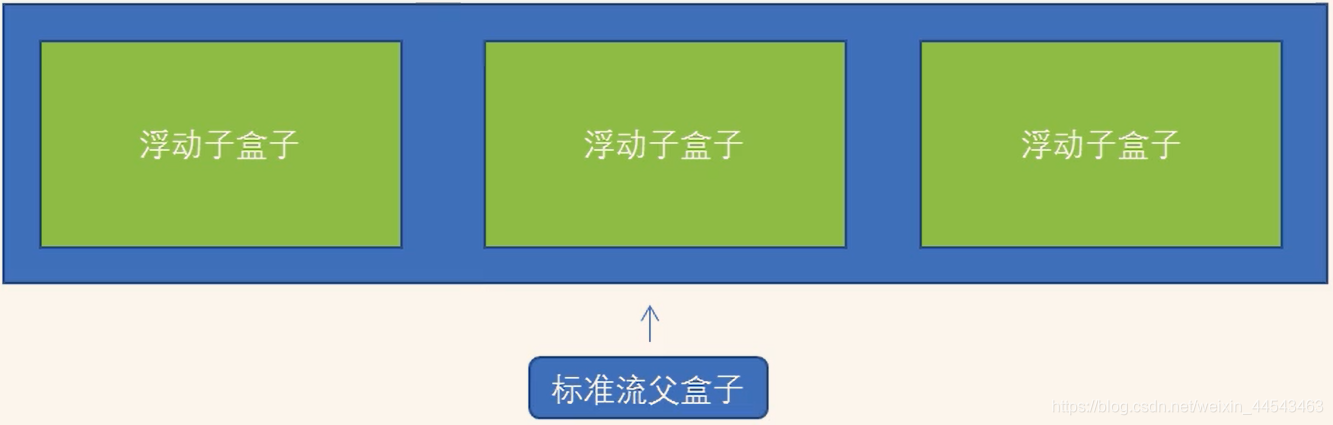
前端笔记 | CSS浮动
CSS提供了三种传统布局方式:普通流(标准流)、浮动、定位。三种布局方式都是用来摆放盒子的,盒子摆放到合适的位置,布局自然就完成了。实际开发中,一个页面基本都包含了这三种布局方式(移动端有新的布局方式)
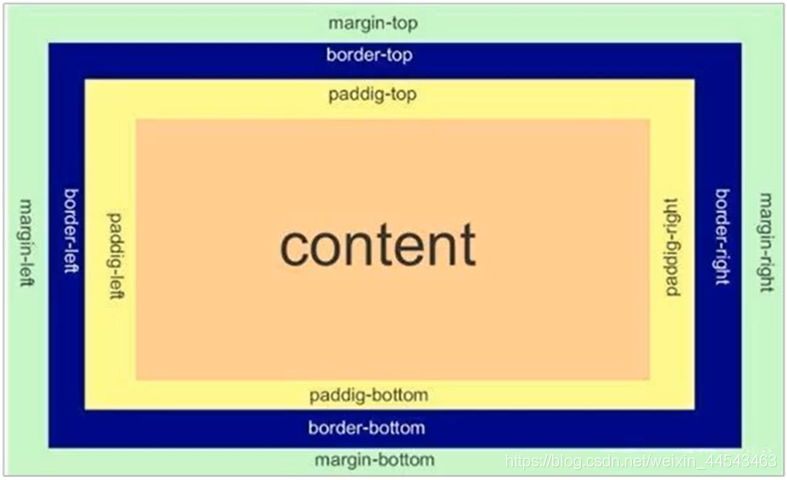
前端笔记 | CSS盒子模型
网页布局学习有三大核心,盒子模型,浮动和定位,学习盒子模型可以帮助我们很好的布局页面。网页布局过程:先准备好相关的网页元素,利用CSS设置盒子样式,然后摆放到相应位置,往盒子里面装内容。
前端笔记 | CSS进阶
CSS中根据选择器的类型把选择器分为基础选择器和复合选择器,复合选择器是建立在基础选择器之上,对基本选择器进行组合而成的。通过CSS背景属性可以为页面内元素添加背景样式背景属性可以设置背景颜色、背景图片、背景平铺、背景图片位置、背景图像固定等。
前端笔记 | CSS基础
CSS的主要使用目的就是美化网页,布局页面。只用HTML时,网页显示效果很不好看。CSS也是一种标记语言,主要用于设置HTML页面中的文本内容(字体、大小、对齐方式等)、图片的外形(宽高、边框样式、边距等)以及版面的布局和外观显示样式。

前端笔记 | HTML基础
HTML是用来描述网页的一种语言。HTML指超文本标记语言。HTML不是编程语言,是一种标记语言。HTML标题、段落、链接、图像的使用方法。元素、属性、格式化;链接、样式、表格;列表、块、布局、表单的创建方法。