【统计学习方法笔记03】k近邻法
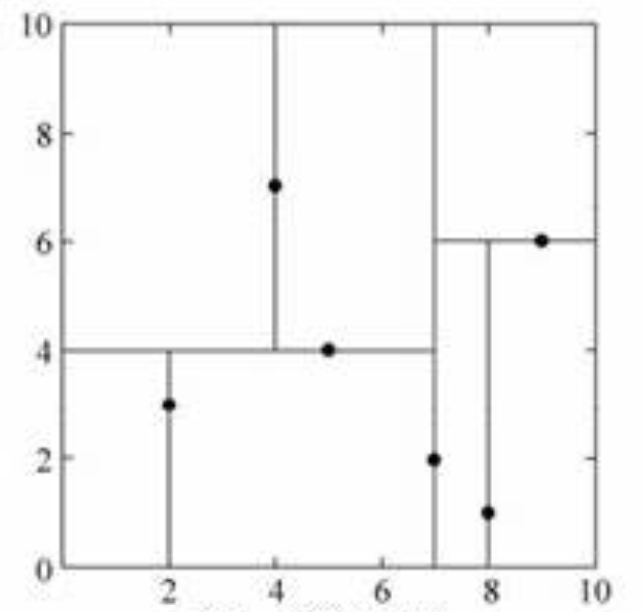
近邻算法,假设给定了一个训练数据集,其中实例类别已定。分类时,对新的实例,根据其k个最近邻的训练实例的类别, 通过多数表决等方式进行预测。因此,k近邻法不具有显式的学习过程。

使用内网穿透SakuraFrp远程连接服务器
不想使用向日葵和todesk等工具远程连接桌面,而且个人电脑和服务器也不在一个局域网下,想要远程连接服务器,因此考虑使用内网穿透。
【统计学习方法笔记02】感知机
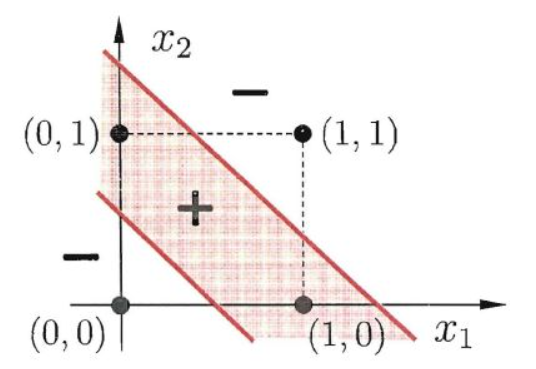
感知机是二类分类的线性分类模型,输入为实例的特征向量,输出为实例的类别,旨在求出将训练数据进行线性划分的分离超平面。
【统计学习方法笔记01】统计学习概论
统计学习是关于计算机基于数据构建概率统计模型,并运用模型对数据进行预测与分析的一门学科。本文是对李航老师的《统计学习方法》一书学习笔记。
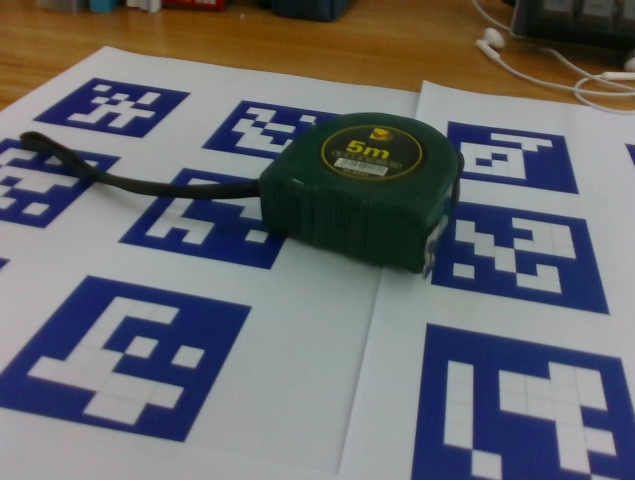
制作自己的Linemod数据集(ObjectDatasetTools)
目前正在学习6D位姿估计算法,该领域最常用的数据集就是LineMod数据集,但是只在数据集上测试还是不够,想要实际应用还需要搭建自己的数据集。
【论文笔记】FFB6D
FFB6D相当于在特征提取阶段就将RGB和点云信息进行了融合,然后进行实例分割和关键点检测。
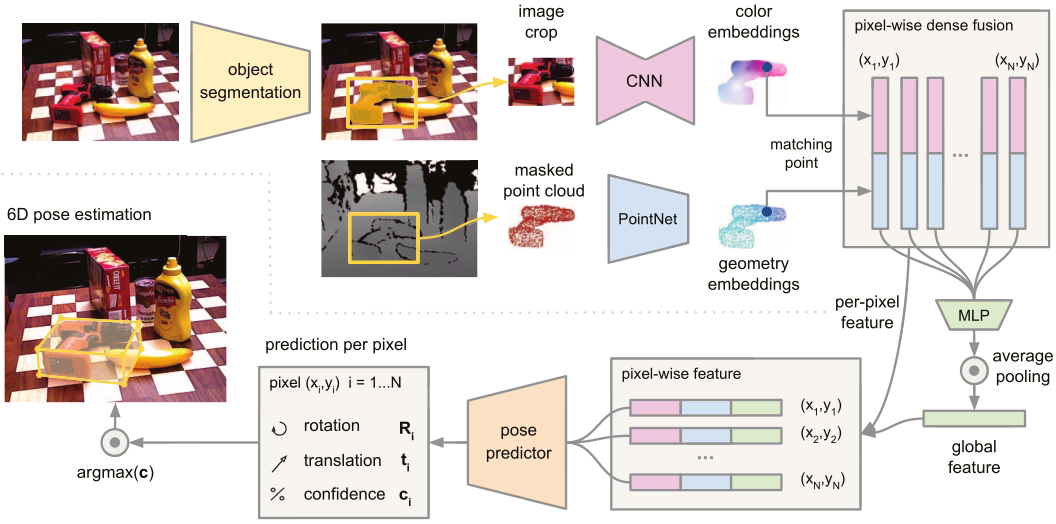
【论文笔记】DenseFusion
本文提出了一种异形架构,对两个数据源(RGB和深度图)进行分别处理,并用一种新型的dense fusion network提取像素级稠密特征,从中估计姿态。
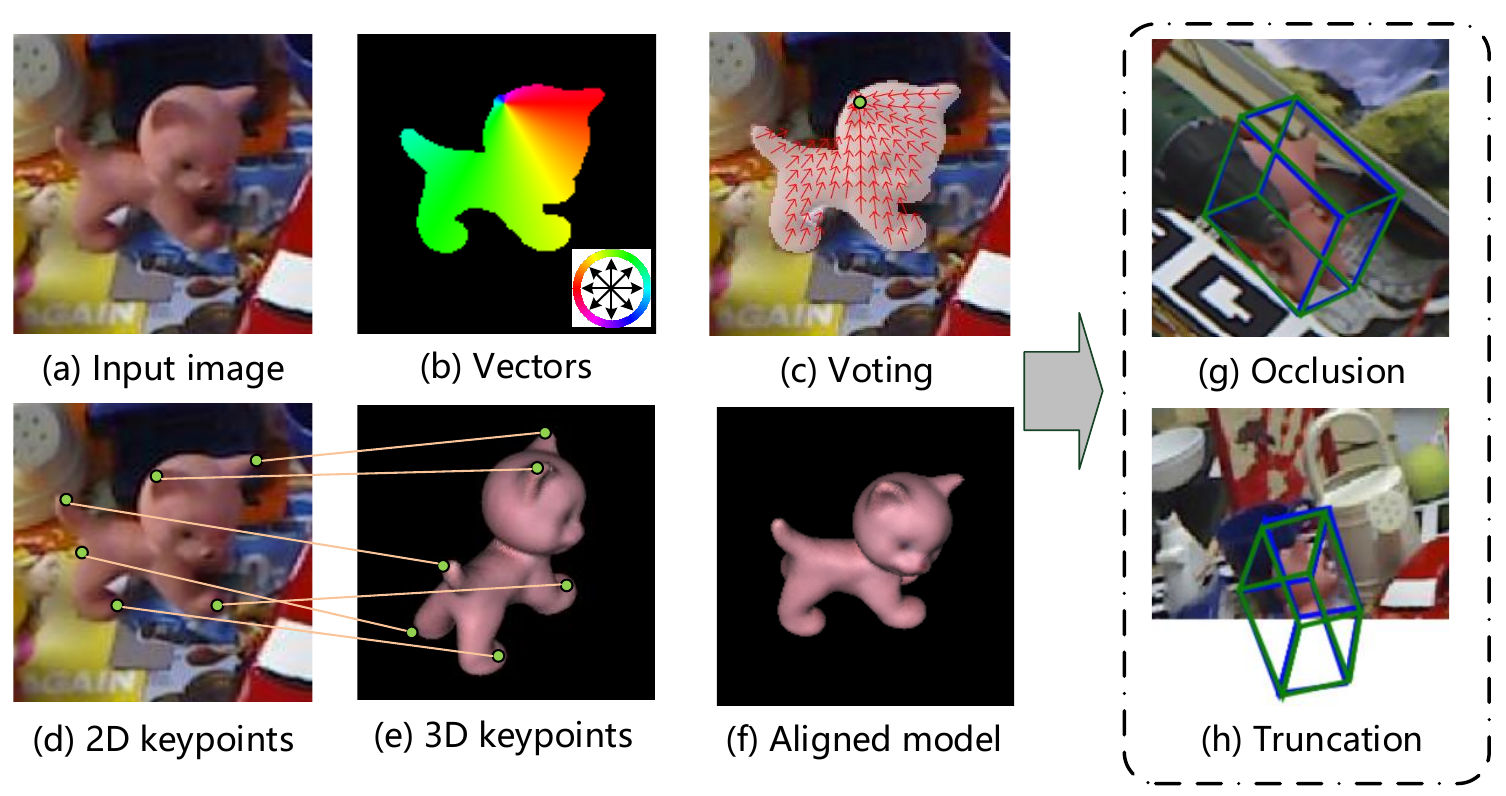
【6D位姿估计算法】PVNet
尝试测试PVNet,中途放弃。
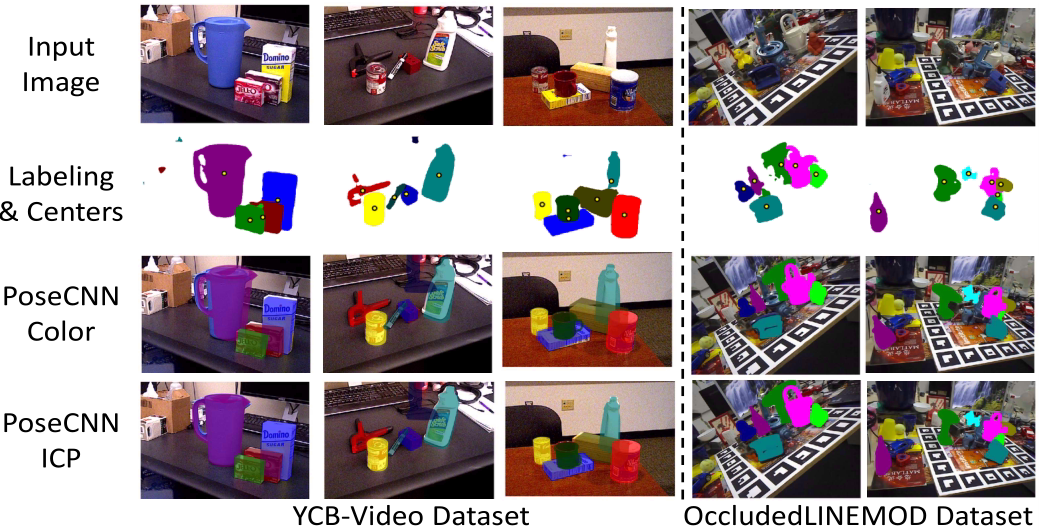
【6D位姿估计算法】PoseCNN
解决物体之间的遮挡和聚集增加的6D位姿估计的难度,通过主干网络加ICP点配对的方式实现位姿估计。

【Qt学习笔记05】Qt中调用ROS库
对机器人的软件开发的离不开ROS,可操作界面离不开Qt,本文介绍在Qt中调用ROS库的方法。