【强化学习笔记】强化学习基础
一、基本概念
1.1 专业术语
(1)状态(State):状态可以被理解为当前环境的情况。
(2)动作(Action):动作是智能体(agent)采取的行为。
(3)策略(Policy):策略是用于在给定观测状态下做出决策的函数,通常表示为 $\pi(a|s)$,其中 $a$ 是动作,$s$ 是状态。强化学习的目标是学习策略函数,通常以概率密度函数的形式表示。
(4)奖励(Reward):奖励定义了奖励的方式,对强化学习的结果产生重要影响。
(5)状态转移(State Transition):状态转移表示在当前状态下,当智能体执行一个动作后,环境可能随机转移到的下一个状态的概率,通常表示为 $P(S’|S, A)$。
(6)回报(Return):回报又被称为未来奖励的累积,通常表示为 $U_t = R_t + R_{t+1} + R_{t+2} + \ldots$。
(7)折扣回报(Discounted Return):折扣回报考虑未来奖励的折扣效应,用折扣率 $\gamma$ 表示,通常表示为 $U_t = R_t + \gamma R_{t+1} + \gamma^2 R_{t+2} + \ldots$。
(8)动作价值函数(Action-Value Function):动作价值函数表示在给定状态和动作下,智能体可以获得的期望回报,通常表示为 $Q_\pi(s_t, a_t) = E[U_t | S_t=s_t, A_t=a_t]$。最优策略下的动作价值函数被表示为 $Q^*(s_t, a_t) = \max_\pi Q_\pi(s_t, a_t)$,使用动作价值函数可以评估当前动作的质量。
(9)状态价值函数(State-Value Function):状态价值函数表示在给定状态下,按照策略函数的预期回报,通常表示为 $V_\pi(s_t) = E_A[Q_\pi(s_t, A)]$。状态价值函数可以告诉我们当前状态的好坏程度。
(10)交叉熵(Cross Entropy):交叉熵用于度量两个概率分布之间的差异,通常表示为 $H(\textbf p, \textbf q) = -\sum^m_{j=1}p_j\cdot \log(q_j)$。当两个概率分布相同时,交叉熵达到最小值。
1.2 强化学习的随机性
(1)Action动作的随机性
因为动作是根据策略函数随机抽样得到的,因此agent有可能做策略中的任何一种动作,虽然这些动作的概率有大有小,但是动作本身是随机的。
(2)State transitions状态转移的随机性
假定agent作出了一个动作,环境会用概率随机抽样,给出下一个状态。
1.3 强化学习如何控制agent
(1)如果有策略函数 $\pi(a|s)$
- 给定一个观测状态 $s_t$
- 利用策略函数从所有可能的动作中随机采样 $a_t~\pi(\cdot|s_t)$
(2)如果有最优的动作价值函数 $Q^(s,a)$
- 给定一个观测状态 $s_t$
- 最大化 $a_t=argmax_a Q^*(s_t,a)$ 来选择动作
二、价值学习 Deep Q-Network(DQN)
$U_t$ 反映未来奖励的总和,因此我们要知道 $U_t$ 的大小,由于其是一个随机变量,我们可以对 $U_t$ 求期望,只留下 $s_t$ 和 $a_t$ 两个变量。
$$Q_\pi(s_t,a_t)=E[U_t|S_t=s_t,A_t=a_t]$$
要想进一步消除策略函数 $\pi$,可以对 $Q_\pi$ 关于 $\pi$ 球最大化,记为 $Q^*$
$$Q^*(s_t,a_t)=max_\pi Q_\pi(s_t,a_t)$$
这个参数告诉我们不管在什么情况 $s_t$ 下做动作 $a_t$,那么期望顶多就是 $Q^*(s_t,a_t)$。
目标:完成任务(最大化总回报)
问题:如果已知 $Q^(s,a)$,那么最好的动作就是 $a^=argmax_a Q^(s,a)$,因为 $Q^$ 指示了该agent在s状态下选择a动作的好坏程度
挑战:我们不知道 $Q^*(s,a)$
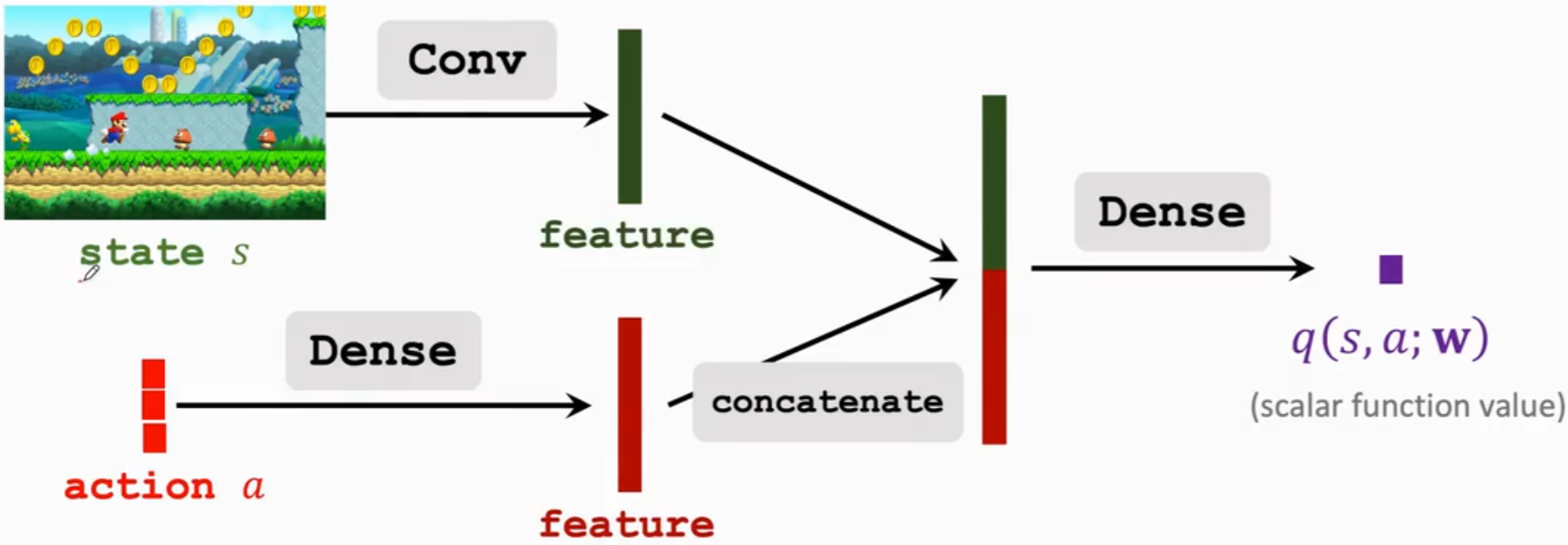
(1)什么是 DQN
我们使用神经网络 $Q(s,a;w)$ 来近似 $Q^*(s,a)$,其中 w 是要近似的参数,s 是输入,a 是输出是对所有动作的打分。
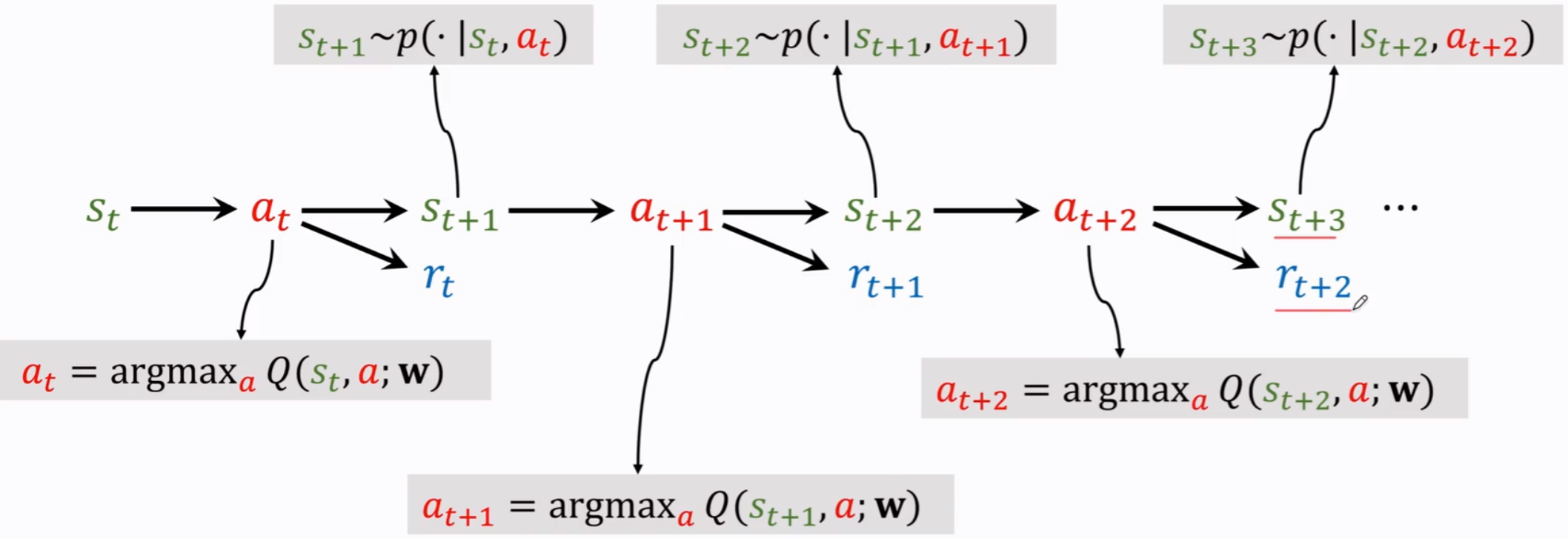
当前观测到状态 $s_t$,用DQN把 $s_t$ 作为输入,为所有动作打分,选出分数最高的动作作为 $a_t$。
agent 作出动作 $a_t$ 后,环境会改变,用状态转移函数 $p$ 随机抽取一个新的状态 $s_{t+1}$,环境还会告诉我们一个回报 $r_t$,这个 $r_t$ 就是训练DQN的关键。
(2)如何训练 DQN
常规的网络训练过程如下:
- 首先对任务结果做一个预测 $q=Q(w)$
- 完成任务后获得目标 $y$
- 计算损失 $L=\frac{1}{2}(q-y)^2$
- 计算梯度 $\frac{\partial L}{\partial w}=\frac{\partial L}{\partial q}\cdot \frac{\partial q}{\partial w}$
- 更新参数 $w_{t+1}=w_t-\alpha \cdot\frac{\partial L}{\partial w}|_{w=w_t}$
但这种方式需要完整完成一次任务后才能更新参数,而能否执行一部分任务后就开始更新参数,因此有了 Temporal Difference Learning (TD算法),过程如下:
- 首先对任务结果做一个预测 $q=Q(w)$
- 执行一部分任务后,对任务结果再进行预测 $y$,此时的 $y$ 包括已经完成的部分和对剩下部分的预测,因此比 $q$ 更可靠
- 计算损失 $L=\frac{1}{2}(q-y)^2$
- 计算梯度 $\frac{\partial L}{\partial w}=\frac{\partial L}{\partial q}\cdot \frac{\partial q}{\partial w}$
- 更新参数 $w_{t+1}=w_t-\alpha \cdot\frac{\partial L}{\partial w}|_{w=w_t}$
在深度强化学习中,也就是下面这个公式
$$Q(s_t,a_t;w)\approx r_t+\gamma\cdot Q(s_{t+1},a_{t+1};w)$$
对未来奖励总和的期望,就是真实已经观测到的奖励,加在t+1时刻对未来奖励的期望。
- 首先进行预测 $Q(s_t,a_t;w_t)$
- 获得TD目标 $y_t=r_t+\gamma\cdot Q(s_{t+1},a_{t+1};w_t)=r_t+\gamma\cdot max_a Q(s_{t+1},a;w_t)$
- 计算损失 $L_t=\frac{1}{2}[Q(s_t,a_t;w)-y_t]^2$
- 进行剃度下降 $w_{t+q}=w_t-\alpha\cdot\frac{\partial L_t}{\partial w}|_{w=w_t}$
(3)经验回放
之前我们使用在线梯度下降来更新 $w$,以此来减小TD errer $\delta_t=q_t-t_t$。
我们定义一个经验transition为$(s_t,a_t,r_t,s_{t+1})$,传统的方法再每使用一个transition后就会丢弃它,这回造成经验的浪费。此外传统的方法还忽略了不同经验之间的相关性。
将最近的n个transition存储进一个replay buffer,当有新的经验进来后,就删除老的transition。
- 每次从buffer中随机抽取一个transition
- 计算TD error
- 极端梯度
- 进行随机梯度下降(实际一般使用minibatch SGD,一次取多个transition)
优先经验回放:为了解决数据的不均匀性,可以使用重要性抽样代替平均采样。可以根据TD error抽样,误差越大的,transition被抽样的概率越大。
学习率比例设置:如果一个transition有较大的抽样概率,那么其学习率应该设置的比较小。
更新TD error:如果一个transition没有被用过,那么就设置它的TD error为最大值,在训练DQN的同时,对TD error进行更新。
三、策略学习
策略函数 $\pi(a|s)$是一个概率密度函数,对每一个给定的状态 $s$,策略函数会抽取一个最优的动作 $a$ 作为将要执行的动作。
理想情况下,列出所有的状态和动作,计算所有状态和动作之间的概率即可。
但是实际情况下有无数个状态,不可能记录所有的状态对应的动作,因此需要函数近似。一般使用神经网络进行近似,即policy network $\pi(a|s;\theta)$
状态价值函数$V_\pi(s_t)=E_A[Q_\pi(s_t,A)]$,状态价值函数可以告诉我们当前的局势好不好。在状态已知时,还可以判断策略好不好,策略越好,$V_\pi$ 越大,任务完成成功率越高,$V_\pi$ 可以表示为:
$$V_\pi(s_t)=E_A[Q_\pi(s_t,A)]=\sum_a\pi(a|s_t)\cdot Q_\pi(s_t,a)$$
使用神经网络替换策略函数,因此得到:
$$V_\pi(s_t;\theta)=\sum_a\pi(a|s_t;\theta)\cdot Q_\pi(s_t,a)$$
给定状态 $s$,策略函数函数越好,价值函数越大。因此可以考虑通过改变神经网络参数 $\theta$,让 $V(s;\theta)$ 变大,基于这个思想,可以求期望:
$$J(\theta)=E_s[V(S;\theta)]$$
策略网络越好,$J(\theta)$ 就越大,为了改变 $\theta$,我们使用策略梯度算法。
- 观测状态 $s$
- 更新策略 $\theta=\theta+\beta\cdot\frac{\partial V(s;\theta)}{\partial \theta}$,做梯度上升,因为我们希望价值函数越大越好。
对于离散的动作,使用$\frac{\partial V(s;\theta)}{\partial \theta}=\sum_a \frac{\partial \pi(a|s;\theta)}{\partial \theta}\cdot Q_\pi(s,a)$
对于连续的动作,使用$\frac{\partial V(s;\theta)}{\partial \theta}=E_{A~\pi(\cdot|s;\theta)} [\frac{\partial \pi(a|s;\theta)}{\partial \theta}\cdot Q_\pi(s,a)]$

四、Actor-Crictic
状态价值函数的定义如下:
$$V_\pi(s_t)=\sum_a\pi(a|s_t)\cdot Q_\pi(s_t,a)$$
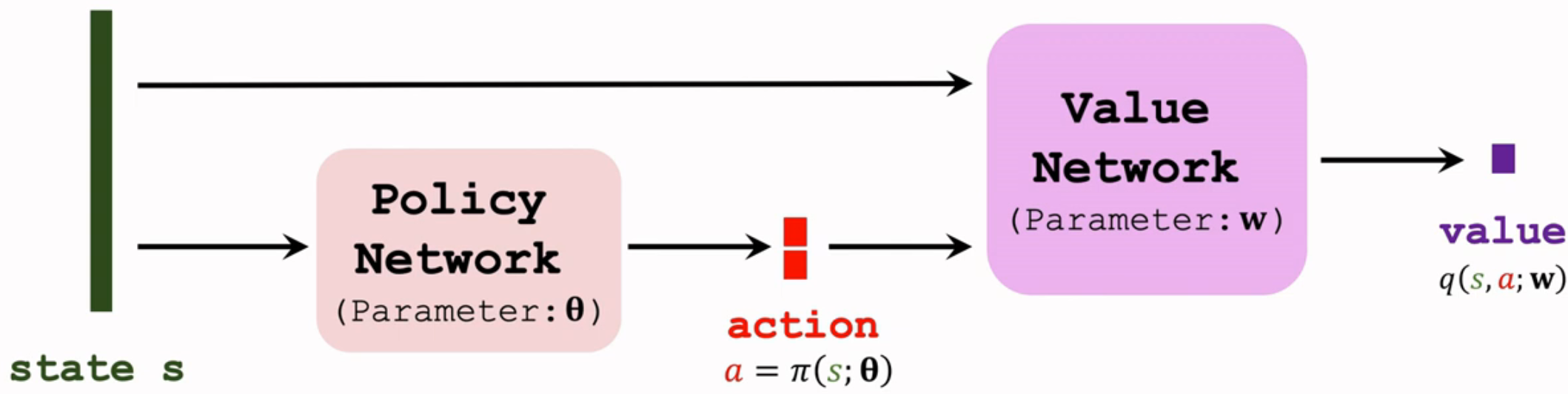
策略网络(产生动作):
- 使用神经网络 $\pi(a|s;\theta)$ 来近似策略函数 $\pi(a|s)$
- 其中 $\theta$ 是训练的参数
价值网络(产生评判标准):
- 使用神经网络 $q(s,a;w)$ 来近似价值函数 $Q_\pi(s,a)$
- 其中 $w$ 是训练的参数
因此状态价值函数可以写成
$$V_\pi(s_t)=\sum_a\pi(a|s_t;\theta)\cdot Q_\pi(s_t,a;w)$$
同时训练策略网络和价值网络,就称为 Actor-Critic Method,大致步骤如下:
- 观测当前状态 $s_t$
- 根据策略函数 $\pi(\cdot|s_t;\theta_t)$ 随机采样获得动作 $a_t$
- 执行动作 $a_t$,并观测新的状态 $s_{t+1}$ 和回报 $r_t$
- 更新价值网络的参数 $w$,使用TD算法
- 更新策略网络的参数 $\theta$,使用策略梯度算法
训练过程中需要同时训练策略网络和价值网络,利用价值网络对策略网络进行评分。训练完成后就不需要价值网络了,只需要策略网络生成动作。
五、蒙特卡洛树搜索(Monte Carlo Tree Search)
5.1 基本思想
蒙特卡洛树搜索的思想是人们必须要向前看很多步,看到未来时间内所有可能的情况,挑选最优的执行动作。
- 如果我在此时选择执行动作 $a_t$
- 那么未来一段时间环境的反馈是怎么变化的 $s_{t+1}$
- 基于这种环境变化,我又会执行动作 $a_{t+1}$
- 此时环境又会如何变化
如果一个agent能够穷举所有的可能性直到任务完成,那么这个任务一定有很高的成功率。
5.2 过程
(1)选择
根据分数选择一个动作(假想的动作,实际上并不会执行);
首先对所有可能的动作 $a$,计算得分:
$$score(a)=Q(a)+\eta\cdot\frac{\pi(a|s_t;\theta)}{1+N(a)}$$
其中 $Q(a)$ 是蒙特卡洛树搜索计算的动作价值
$\pi(a|s_t;\theta)$ 是学习好的策略网络,动作越好,策略分数越高
$N(a)$ 是给定环境状态 $s_t$ 情况下,目前为止选择动作 $a$ 的次数,如果同一个动作被探索太多次,该项分母就会变大。
(2)扩展
假想环境更新;
(3)评估
评价状态价值得分 $v$ 和回报 $r$,将动作的分数设为 $\frac{v+r}{22}$;
(4)备份
用动作的分数 $\frac{v+r}{2}$ 更新动作价值:
$$Q(a_t)=mean(the recorded V’s)$$
将以后所有步的状态价值进行平均。
六、连续控制
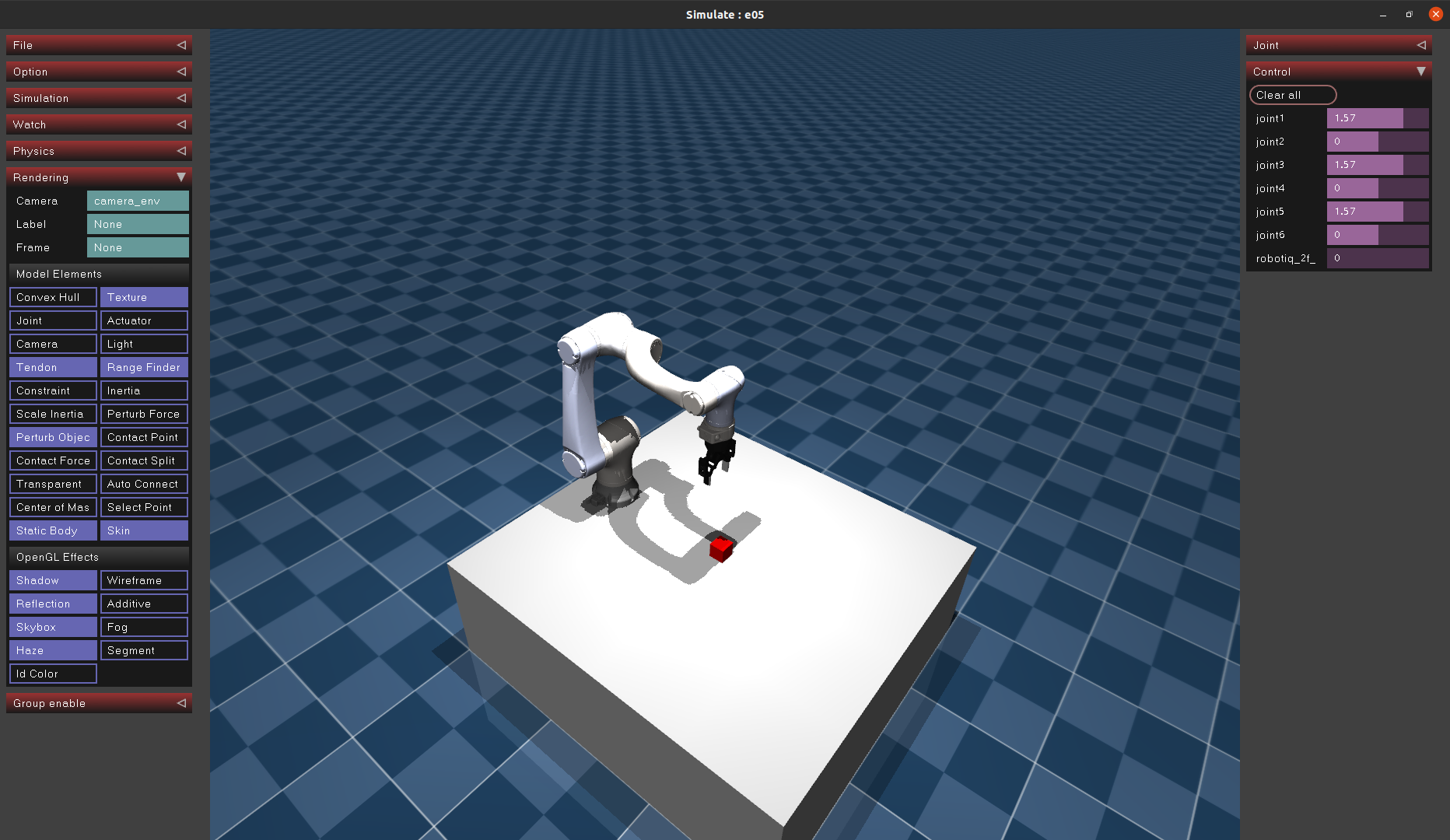
在实际进行强化学习时,可能有离散动作空间(例如上下左右控制游戏人物),也可能是连续动作(机械臂关节控制)。
在进行离散控制时,可以直接使用分类的思想,得到一个onehot向量,每个向量元素代表执行该动作的得分,以此来获得应该执行那种动作。而连续控制中动作空间是有无穷维的,因此不能直接使用这种思想实现连续控制。
比较常规的一种解决思路是将动作空间离散化,但这种方式也有问题,例如机械臂的6个自由度,就算每个自由度离散为360个点,那么整个动作空间也有 $360^6$ 个点,这会造成维度灾难,在训练时非常困难。
因此有两种方式实现连续控制:
- 确定性策略网络
- 随机策略网络
6.1 确定策略梯度(Deterministic Policy Gradient DPG)
考虑一个只有2自由度的机械臂,基座运动范围为(0,180),机械臂运动范围为(0,360),因此机械臂的动作空间是 $A=[0,180]\times[0,360]$ 的连续集合,动作就是一个二维向量。
DPG 是一种 Actor-Critic 方法
- 有一个策略网络,控制 agent 运动,它根据状态 s 做出决策 a;
使用策略网络 $a=\pi(s;\theta)$ 根据输入状态 s,输出一个确定的动作 a,这里的动作 a 就是机器人的二维动作向量。 - 有一个价值网络,不控制 agent,它根据状态 s,给动作 a 打分,从而指导策略网络做出改进。
使用价值网络 $q(s,a;w)$,输入状态 s 和动作 a,输出一个实数 value 是对动作的评价,动作越好,value 越大。
因此 DPG 的原理就是训练这两个网络。
(1)价值网络训练
- 每次得到一个训练数据 transition $(s_t,a_t,r_t,s_{t+1})$
- 用价值网络预测当前时刻 t 下的动作价值 $q_t=q(s_t,a_t;w)$
- 用价值网络预测下一时刻 t+1 的动作价值 $q_{t+1}=q(s_{t+1},a_{t+1}‘;w)$ ,其中 $a_{t+1}’=\pi(s_{t+1};\theta)$,这个动作并不是 agent 真正执行的动作,$a_{t+1}'$ 只用于更新价值网络。
- 计算 TD error:$\delta_t=q_t-(r_t+\gamma\cdot q_{t+1})$,其中第二项是 TD Target,它一部分是真实观测到的奖励,另一部分是价值网络自己做出的预测。因为我们认为第二项中由于包含本步真实奖励,比单纯的 $q_t$ 更接近真实情况,因此要让 $q_t$ 与 TD Target 接近,也就是让 TD error 尽可能小。
- 进行梯度下降更新 w:$w=w-\alpha\cdot\gamma_t\cdot\frac{\partial q(s_t,a_t;w)}{\partial w}$
但这其中有一个问题,就是计算 TD error $\delta_t=q_t-(r_t+\gamma\cdot q_{t+1})$ 这一步时,会出现 bootstrapping 问题,也就是如果初始值高估或者低估,那么 TD target 就会有高估或低估,并传播回价值网络自身,导致高估或低估一直存在,解决方案就是用不同的神经网络计算 TD Target,也就是用 Target Networks。
- 每次得到一个训练数据 transition $(s_t,a_t,r_t,s_{t+1})$
- 用价值网络预测当前时刻 t 下的动作价值 $q_t=q(s_t,a_t;w)$
- 用价值网络预测下一时刻 t+1 的动作价值 $q_{t+1}=q(s_{t+1},a_{t+1}‘;w^-)$ ,其中 $a_{t+1}’=\pi(s_{t+1};\theta^-)$
$\pi(s_{t+1};\theta^-)$ 是 Target policy network 用来代替策略网络,它的网络结构和策略网络一模一样,但是参数不一样。
$q(s_{t+1},a_{t+1}';w^-)$ 是 Target value network,它与价值网络结构一样,参数不同。
(2)策略网络训练
训练策略网络,需要靠价值网络评价动作的好坏,从而指导策略网络进行改进。
也就是更新策略网络的参数 $\theta$ 让价值网络认为动作 $a=\pi(s;\theta)$ 更好,也就是改进 $\theta$ 让价值 $q(s,a;w)=q(s,\pi(s;\theta);w)$ 尽可能大。
由于给定状态 s,策略网络会输出一个确定的动作 a,而如果价值网络也是确定的,那么输出的价值就是确定的。
因此问题中只需要改变 $\theta$,使得价值 q 变大,也就是计算 $q(s,a;w)$ 对 $\theta$ 的梯度,然后用梯度上升更新 $\theta$,就可以让 $q$ 变大,这个梯度就叫确定策略梯度 DPG。
$$
g=\frac{\partial q(s,\pi(s;\theta);w)}{\partial\theta}=\frac{\partial a}{\partial \theta}\cdot\frac{\partial q(s,a;w)}{\partial a}
$$
其中 $a=\pi(s;\theta)$,然后进行梯度上升 $\theta=\theta+\beta\cdot g$
策略网络和价值网络联合具体步骤如下:
- 策略网络做一个决策:$a=\pi(s;\theta)$
- 计算价值网络的输出:$q_t=q(s,a;w)$
- 用 DPG 更新策略网络: $\theta=\theta+\beta\cdot \frac{\partial a}{\partial \theta}\cdot\frac{\partial q(s,a;w)}{\partial a}$
- 利用 Target networks $\pi(s;\theta^-)$ 和 $q(s,a;w^-)$ 计算 $q_{t+1}$
- 计算 TD error:$\delta_t=q_t-(r_t+\gamma\cdot q_{t+1})$
- 更新价值网络:$w=w-\alpha\cdot\gamma_t\cdot\frac{\partial q(s_t,a_t;w)}{\partial w}$
- 更新 Target networks 的参数:$w^-=\tau\cdot w+(1-\tau)\cdot w^-$,$\theta^-=\tau\cdot \theta+(1-\tau)\cdot \theta^-$,其中 $\tau$ 是超参数
6.2 随机策略用于连续控制
首先考虑自由度等于 1 的随机策略连续控制,也就是动作都是实数。
设 $\mu$ 代表均值,和 $\sigma$ 代表标准差,都是状态 s 的函数。
用正态分布的概率密度函数作为策略函数:
$$
\pi(a|s)=\frac{1}{\sqrt{6.28}\sigma}\cdot exp(-\frac{(a-\mu)^2}{2\sigma^2})
$$
对于 d 维情况一样,动作是 d 维向量。
设向量 $\mu$ 代表均值,和向量 $\sigma$ 代表标准差,都是状态 s 的函数。
使用特殊正态分布作为策略函数:
$$
\pi(a|s)=\prod_{i=1}^d\frac{1}{\sqrt{6.28}\sigma_i}\cdot exp(-\frac{(a_i-\mu_i)^2}{2\sigma^2_i})
$$
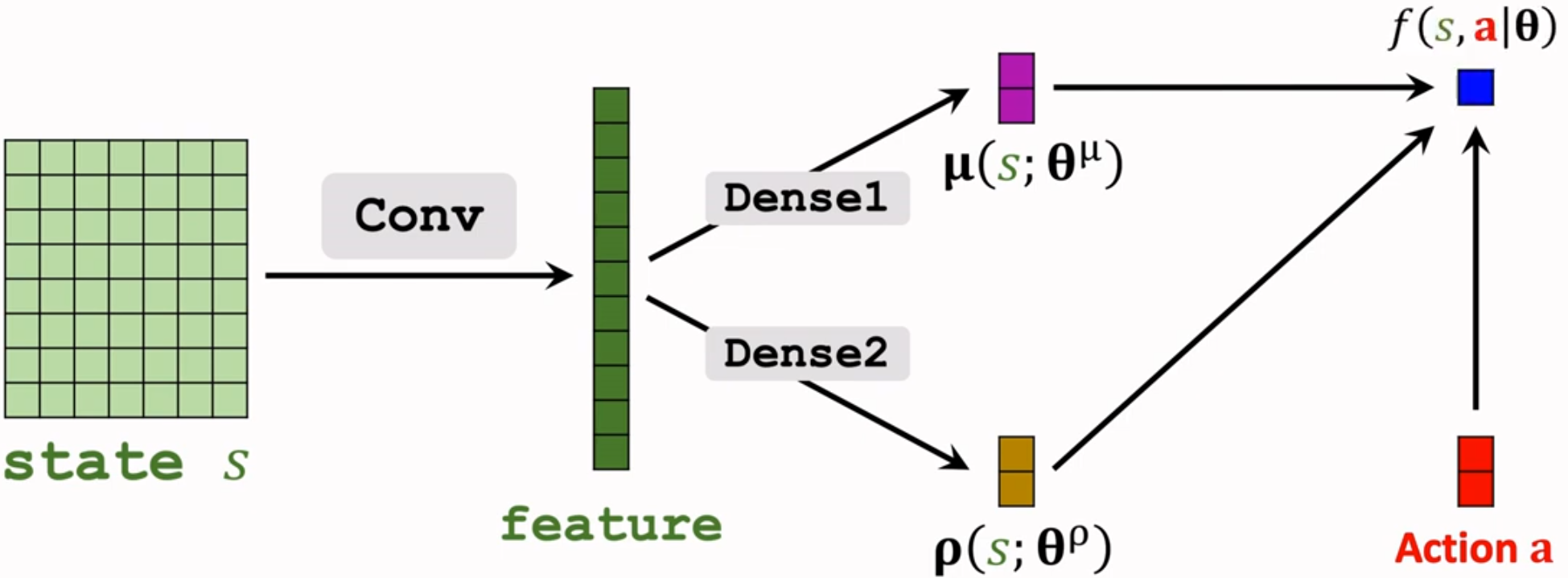
但这里我们不知道 $\mu$ 和 $\sigma$,也就不知道策略函数。
因此可以用神经网络来近似 $\mu(s;\theta^{\mu})$ 和 $\rho(s;\theta{\rho})$,其中 $\rho_i=ln\sigma_i^2$
将策略函数进行取对数,将连乘变成连加,得到辅助神经网络 $f(s,a;\theta)=\sum^d_{i=1}[-\frac{\rho_i}{2}-\frac{(a_i-\mu_i)^2}{2\cdot exp(\rho_i)}]$,计算 f 关于其中卷积层和全连接层的参数的梯度,进而实现反向传播更新参数。
参考:
- 王树森. 强化学习课程(Youtube)
 微信支付
微信支付 支付宝
支付宝